States (IE/IEX only)
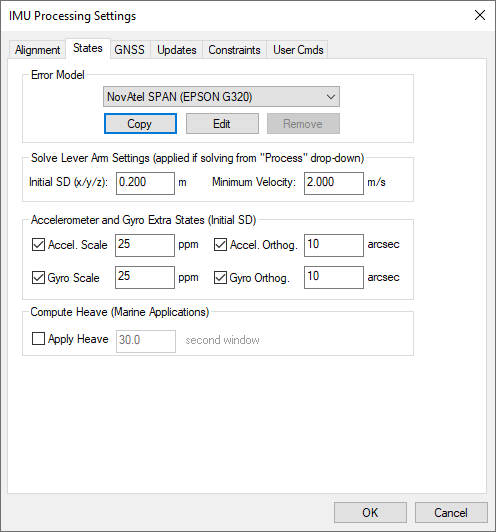
Error Model
Error models consist of initial standard deviation and spectral density values which are indicative of IMU sensor quality. They help control the extent to which Inertial Explorer weights GNSS and INS measurements during processing.
Inertial Explorer comes pre-configured with error models for all SPAN IMUs. These are automatically selected when loading an appropriate processing profile for the application (aerial, ground vehicle, marine and pedestrian) and SPAN system used. Inertial Explorer also comes pre-configured with a handful of error models developed for third party IMUs as well as generic error models that can be a useful starting point when attempting to develop your own new error model for a non-SPAN IMU. See Edit Error Model Values for information about the settings you can change in the Error Model.
Solve Lever Arm Settings
These values are applied if using the Solve Lever Arm feature under the Process pull-down menu on either the TC or LC processing dialog.
Inertial Explorer's ability to observe the IMU to GNSS lever arm is largely dependent on the length of data collection, quality of GNSS data and vehicle dynamics. This feature is not meant as a substitute for measuring the lever arm but rather for checking or troubleshooting purposes.
Initial SD
This value reflects the uncertainty in the lever arm measurement.
Minimum Velocity
The lever arm state will not be updated unless this minimum velocity has been reached. A minimum value of at least 1 m/s is suggested (but not required) to help avoid the possibility of the IMU to GNSS lever arm state diverging under very low dynamics.
Accelerometer and Gyro Extra States
These options add scale and/or non-orthogonality states to the Kalman filter for the accelerometer and gyroscope measurements. They are often needed by MEMS sensors to account for errors in the manufacturing process.
Compute Heave (Marine Applications)
Heave is not supported on Inertial Explorer Xpress.
For marine users who wish to apply heave compensation to the computed ellipsoidal height, use this option to engage Inertial Explorer’s low-pass filter. The algorithm requires that a window size reflecting the period of the wave motion be entered. The smaller the window size, the more responsive the filter will be to the wave motion. If using this option, the computed ellipsoidal height and the heave compensated height can be viewed from the Height Profile plot. The computed heave value can also be viewed from the Heave plot.
After processing with Apply Heave enabled, you can access heave compensated ellipsoidal and orthometric heights from the Export Wizard. The Height Profile plot will display the processed ellipsoidal height together with the heave-compensated ellipsoidal height in order to show the effect of the heave window used. The longer the window used the smoother the marine heave compensated height will be (i.e., less responsive to changes).