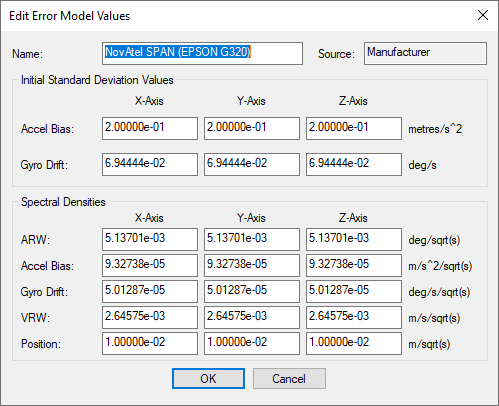
Edit Error Model Values
Error model editing is only necessary when developing your own error model for a new IMU. Note that when working with MEMS sensors, it may also be necessary to enable accelerometer and gyro extra states in order to achieve a reasonable level of performance in addition to error model tuning.
Initial Standard Deviation Values
The following mathematical quantities are available:
Accel Bias
These values represent the initial uncertainties in the a priori knowledge of the constant bias errors in the accelerometer triad. If these bias values were left at zero, meaning that they are unknown, then the standard deviation values entered here should reflect this uncertainty. The processor then computes the biases on-the-fly. These values should be entered in m/s2.
Gyro Drift
These values refer to the initial uncertainty of the a priori knowledge of the sensor drift in the gyroscopes. If the biases are left at zero, then enter standard deviations values here that reflect this. The program attempts to compute reasonable values during processing. All values should be entered in degrees/sec.
Spectral Densities Values
Generally speaking, the lower the grade of the sensor, the larger the spectral densities that should be used for processing. As previously discussed, the spectral densities add noise to the covariance propagation process prior to filtering. Therefore, the higher the densities, the greater the weight that is placed on the GNSS updates during filtering. The following mathematical quantities are available:
ARW (Angular Random Walk)
Angular Random Walk, in degrees, becomes a covariance when multiplied by some time interval, δt. If the sensor triad is problematic in terms of providing an accurate attitude matrix, or if initial alignment is poor, then you may need to introduce large spectral density values here. These spectral components add noise to the computed Kalman covariances for ARW, which, in turn, forces the processor to rely more heavily on the GNSS position and velocity updates. As a result, large errors in the direction cosine matrix are compensated for.
Accel Bias
Accelerometer bias densities, when multiplied by the prediction time interval, act as additive noise to the accelerometer bias states. As such, larger values here may help to compensate for large biases in the accelerometers.
Gyro Drift
Gyroscope drift densities similarly act as additives to the covariances computed for the gyroscope drift states. In the case of inexpensive units, larger values here may be necessary.
VRW (Velocity Random Walk)
Velocity spectral densities are noise densities that account for modeled velocity effects during each Kalman prediction. Increasing this value permits more emphasis to be placed on the GNSS update data, but may also lead to an increase in error growth during outages. For this reason, these values should be determined as part of the tuning process. The default values are recommended unless dealing with a trajectory of unusually high dynamics, such as a race car, in which case these may need to be reduced by an order of magnitude.
Position
Position spectral densities are noise densities that account for modeled position effects during each Kalman prediction. Apply all of the considerations mentioned above for the velocity spectral densities.