Processing Window
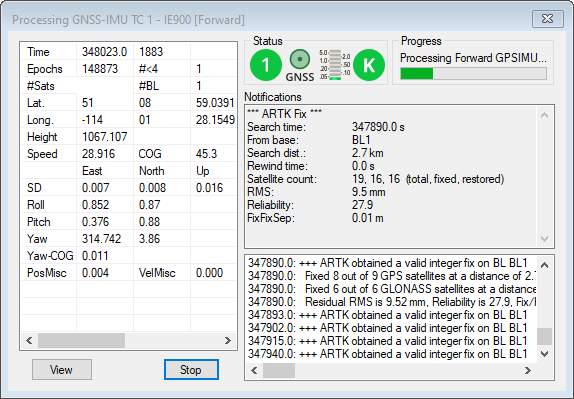
This window appears during processing and shows position, status, progress and any high priority messages output by the processing engine.
Click the View button to customize the fields displayed during processing. See Notifications for descriptions of variables which can be monitored during data processing.
The values in Plot Results differ in the manner in which they are computed depending on the mode of processing being performed.
If the GNSS is being processed, then the values displayed are those computed in the Kalman filter. However, during the IMU processing, the values displayed reflect those calculated in the IMU Kalman filter, using the GNSS information as updates. Ideally, these values should agree. When they do not, monitor the position and velocity misclosure.
The Processing window is updated twice a second.
Status
The Status section of the processing window reports the instantaneous quality number. Quality numbers are meant to provide a high level indication of solution quality and are further described in Table: GNSS Quality Number Description.
If integer carrier phase ambiguities have been fixed, a green circle with the word Fixed will be shown immediately to the right of the quality number. The ARTK statistics of the fix will be shown in the Notifications window below. If integer ambiguities have not been fixed, a blue circle with the word KAR (Kinematic Ambiguity Resolution) will be shown instead.
The instantaneous estimated position error will be shown on a meter immediately to the right of the fixed/float ambiguity status.
Immediately to the right of the estimated position error is the static/kinematic processing mode. If the data is processed in kinematic mode, a green K will be shown, otherwise if the data is processed in static mode a red S will be shown.
Progress
The Progress box graphically displays how much of the data has been processed and how much remains.
View
In the left-hand window, various parameters are available for display via the View button. The list of available parameters is given in Table: Processing Window Parameters.
Notifications
The Notifications window displays all information pertaining to the last ARTK fix. Descriptions of these messages are found in Notifications Windows Messages.
|
Message |
Information |
|---|---|
|
RMS |
Similar to the RMS computed for an ARTK fix, the RMS of a fixed static solution represents the fit of the carrier phase measurements. |
|
Reliability |
See Reliability for ARTK fixes in Table: Notifications Windows Messages for a definition. The reliability for long fixed static solutions may be reported as N/A, which indicates that only one fix was within the search area. Thus, there was no second best RMS in order to use in computing reliability. |
|
Frequency |
Reported as single or dual to indicate whether an L1 only or L1/L2 solution was computed. |
|
Time |
The length of time used by the fixed integer solution in hh:mm:ss format. |
|
Type |
Fixed static solution type used. Continuous looks for the best continuous block of cycle slip free data to use within the fixed integer solution. NewFixed (multi-sat) uses all of the data, although it may reject some sections of data for individual satellites. |