Multi-line body to vehicle frame rotation calibration routine
|
Platform: |
OEM719, OEM729, OEM7500, OEM7600, OEM7700, OEM7720, PwrPak7, CPT7, CPT7700, SMART7-S |
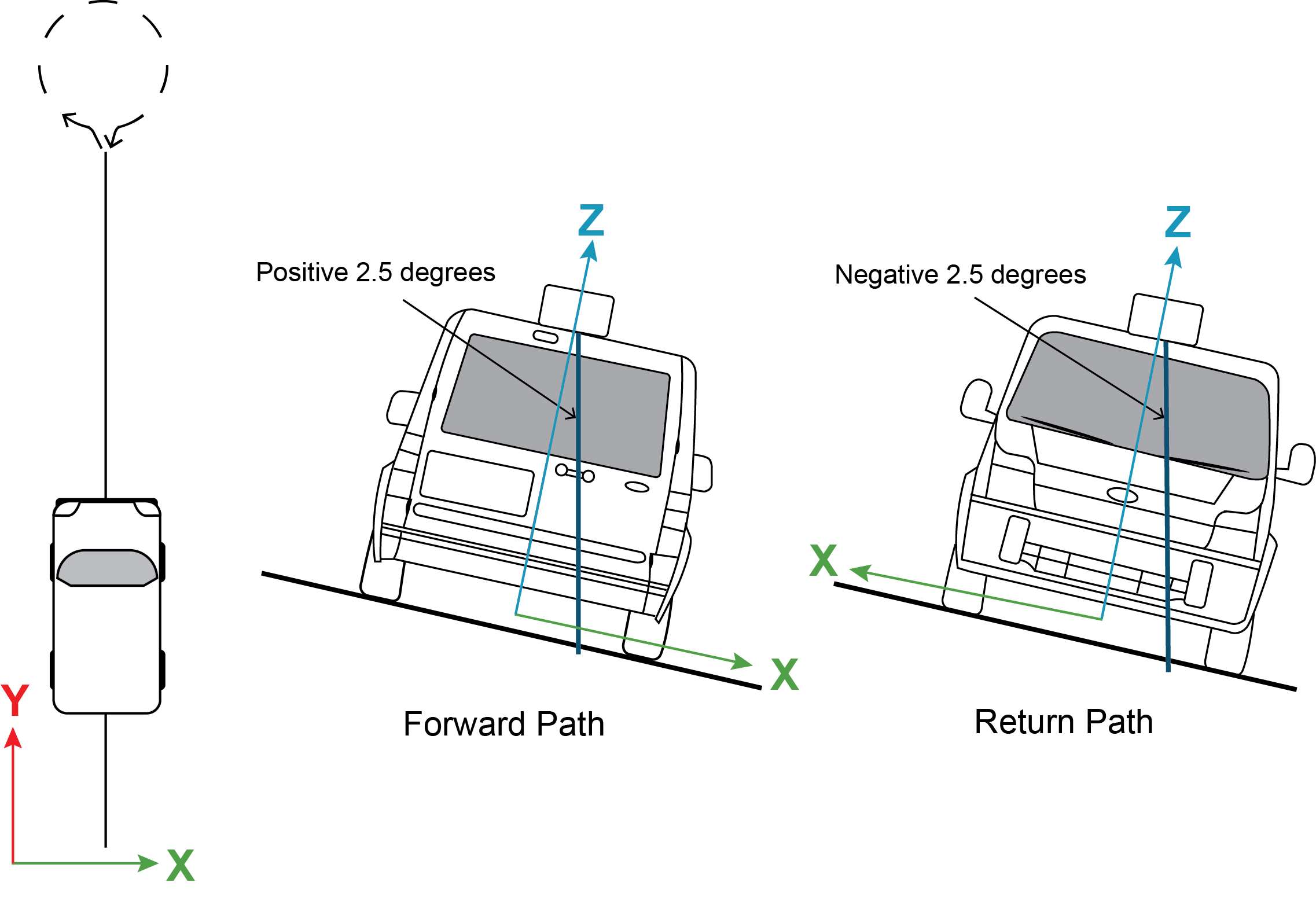
The single pass Body to Vehicle frame offset calibration feature assumes flat ground when estimating the roll offsets between the IMU Body and Vehicle frames, as this component of the rotational offset is difficult to observe through typical ground vehicle motion. In practice this can result in an outstanding roll offset error as high as several degrees. For applications where vehicle roll must be well known, or pass-to-pass accuracy of a highly offset position is especially important, the Multi-Line IMU Body to Vehicle frame offset calibration routine offers higher calibrated accuracy in roll. This is done by running independent calibrations over the same ground path in opposite directions; averaging the results cancels out the effect of any terrain induced roll. A minimum of two iterations are required. Additional iteration pairs can be executed for increased reliability.
Multi-line IMU body to vehicle calibration
The steps for the calibration routine are:
-
Apply power to the
-
Configure the SPAN system
-
Ensure that an accurate lever arm has been entered into the system either manually or through a lever arm calibration, see Lever arm calibration routine.
-
Perform an initial system alignment using one of the methods described in System start-up and alignment techniques. Ensure the system reaches Solution Good.
-
Enable a new calibration using the INSCALIBRATE command, with the optional standard deviation target omitted:
INSCALIBRATE RBV NEW
-
Start to move the vehicle. Drive a straight course, at a vehicle speed greater than 5 m/s (18 km/hr). A distance of approximately 250 metres is recommended.
To monitor the calibration, log INSCALSTATUS using the ONCHANGED trigger.
-
When the end of the available distance is reached, stop the vehicle. Halt the ongoing calibration by sending the INSCALIBRATE command again:
INSCALIBRATE RBV STOP
-
At this point INSCALSTATUS will report a source status of CALIBRATED. Turn the vehicle around and come to a stop on the finishing point of the previous line.
-
Initiate the second pass of the calibration by issuing the INSCALIBRATE command with the ADD parameter:
INSCALIBRATE RBV ADD
-
Drive the vehicle back along the original course, until you reach the starting point for the first pass. Stop the vehicle, and re-issue the INSCALIBRATE command, with the STOP parameter. INSCALSTATUS will again indicate a source status of CALIBRATED.
At this point the Multi-Line calibration can be considered complete, but more iterations can be repeated until the desired accuracy level is reached.
At any point during an active calibration line, the INSCALIBRATE command, with the RESET parameter can be used to reset the calibration. This will ensure that the results of the active line are not added to the Multi-Line calibration. The INSCALSTATUS log will restore the previous source status and calibration values.
-
When the calibration is complete, the calibrated offset value can be viewed in either the INSCALSTATUS log or the INSCONFIG log.
To save a calibrated rotation for subsequent start ups, issue the SAVECONFIG command after calibration is complete. Each time the IMU is re-mounted this calibration should be performed again.
Do not start INS Calibrations (NEW or ADD) until the inertial alignment is completed and system has converged.