SPAN configuration
|
Platform: |
OEM719, OEM729, OEM7500, OEM7600, OEM7700, OEM7720 |
Minimum recommended configuration
When configuring your OEM7 SPAN system for first time use, the following is the minimum amount of information required to ensure proper operation of a SPAN system.
|
Required information |
Required command |
|---|---|
|
IMU type and communication port |
|
|
IMU to primary antenna lever arm |
SETINSTRANSLATION ANT1 |
|
IMU to vehicle frame rotation |
SETINSROTATION RBV |
For optimal SPAN operation, the IMU to antenna lever arms and the IMU to vehicle frame rotation should be measured or calibrated to the best accuracy possible. Even small errors in the lever arm or RBV can lead to significant degradation of the overall INS performance.
While this is the minimum amount of information required, additional information is typically needed for SPAN systems. The following commands are commonly used to configure SPAN systems.
|
Common user settings |
Appropriate command |
Notes |
|---|---|---|
|
IMU to secondary antenna lever arm |
SETINSTRANSLATION ANT2 |
Only required for dual antenna systems |
|
IMU to output position offset |
SETINSTRANSLATION USER |
Default output position is at the IMU centre |
|
IMU to output frame rotation |
SETINSROTATION USER |
Default output frame is the vehicle frame as defined by SETINSROTATION RBV input |
|
Vehicle type |
|
|
|
Minimum alignment velocity |
|
Configure SPAN manually
Follow these steps to enable INS as part of the SPAN system using software commands:
A GNSS antenna with a clear view of the sky must be connected and tracking satellites for operation.
-
Issue the CONNECTIMU command to specify the type of IMU being used and the receiver port connected to the IMU, see Table: Enable INS commands and the CONNECTIMU command.
Enable INS commands IMU type
CONNECTIMU command
HG1700 AG11
CONNECTIMU COMx HG1700_AG11
HG1700 AG17
CONNECTIMU COMx HG1700_AG17
HG1700 AG58
CONNECTIMU COMx HG1700_AG58
HG1700 AG62
CONNECTIMU COMx HG1700_AG62
IMU-HG1900
CONNECTIMU COMx HG1900_CA50
IMU-ISA-100C
CONNECTIMU COMx ISA100C
IMU-LN200
IMU-LN200CCONNECTIMU COMx LN200
IMU-P1750
CONNECTIMU COMx KVH_1750
IMU-µIMU-IC
CONNECTIMU COMx LITEF_MICROIMU
OEM-HG1900 (CA50)
CONNECTIMU COMx HG1900_CA50
OEM-HG1930 (CA50)
CONNECTIMU COMx HG1930_CA50
OEM-IMU-EG320N
CONNECTIMU SPI EPSON_G320
CONNECTIMU SPI EPSON_G320_200HZ
OEM-IMU-EG370N
CONNECTIMU SPI EPSON_G370
OEM-IMU-HG4930 (AN01)
CONNECTIMU COMx HG4930_AN01
OEM-IMU-HG4930 (AN04)
CONNECTIMU COMx HG4930_AN04
CONNECTIMU COMx HG4930_AN04_400HZ
OEM-IMU-ISA-100C
CONNECTIMU COMx ISA100C
OEM-IMU-STIM300
CONNECTIMU COMx STIM3001
CONNECTIMU COMx STIM300D2
OEM-IMU-µIMU-IC
CONNECTIMU COMx LITEF_MICROIMU3
OEM-IMU-µIMU-UART
CONNECTIMU COMx LITEF_MICROIMUD_400HZ4
UIMU-HG1700-AG58
CONNECTIMU COMx HG1700_AG58
UIMU-HG1700-AG62
CONNECTIMU COMx HG1700_AG62
UIMU-LN200
CONNECTIMU COMx LN200
Use the COM port number the IMU is connected to.
If you are using the OEM719+MIC board stack, you must use COM1.
For SPAN systems with a OEM729 receiver, COM2 is the recommended serial port for the IMU, however you can use any available port for these IMUs. -
If the SPAN system uses an OEM-HG1900 IMU connected to a MIC card, issue the following command.
SETIMUPORTPROTOCOL RS232
Basic configuration of the SPAN system is now complete. The inertial filter starts after the GNSS solution is solved and the IMU is connected.
-
Issue the SETINSTRANSLATION command, using the ANT1 parameter, to enter the distance from the IMU to the GNSS antenna. See the SETINSTRANSLATION command for more information.
If the SPAN receiver has dual antenna inputs, issue the SETINSTRANSLATION command, using the ANT2 parameter, to enter the distance from the IMU to the secondary GNSS antenna.
The offset between the antenna phase centre and the IMU axis must remain constant and be known accurately (m). The X, Y and Z directions are clearly marked on the IMU enclosure. The SETINSTRANSLATION parameters are (where the standard deviation fields are optional and the distances are measured from the IMU to the antenna):
ANT1 x_offset y_offset z_offset [x_stdev] [y_stdev] [z_stdev]
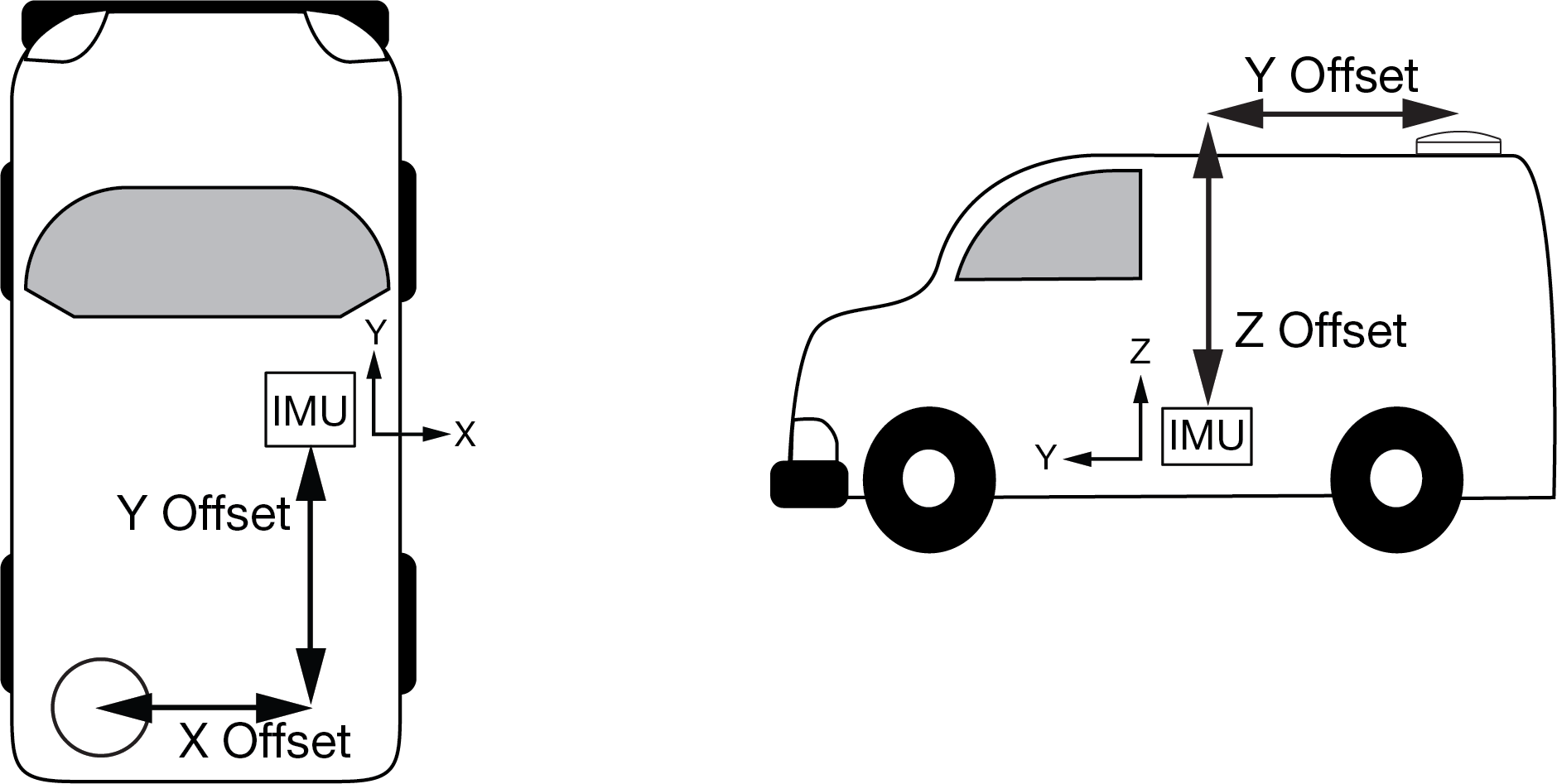
This example shows a mounting configuration with a negative X offset, negative Y offset and positive Z offset.
A typical RTK GNSS solution is accurate to a few centimetres. For the integrated GNSS+INS system to have this level of accuracy, the offset must be measured to within a centimetre. Any offset error between the two systems shows up directly in the output position. For example, a 10 cm error in recording this offset will result in at least a 10 cm error in the output.
If it is impossible to measure the IMU to GNSS antenna offset precisely, the offset can be estimated by carrying out the Lever Arm Calibration Routine. See Lever arm calibration routine.
The Lever Arm Calibration routine is not available for the OEM-HG1930, OEM-IMU-EG320N, OEM-IMU-EG370N, OEM-IMU-HG4930, OEM-IMU-STIM300, PwrPak7-E1, PwrPak7D-E1, PwrPak7-E2, PwrPak7D-E2, CPT7 or CPT7700.
-
Issue the SETINSROTATION command, using the RBV parameter, to enter the Euler Angle rotation from the IMU Body frame to the Vehicle frame. See the SETINSROTATION command for more information.
Accurate knowledge of the rotational offset between the IMU Body frame and the Vehicle frame (the RBV rotation) is critical to correctly computing an attitude solution, and is required before a Kinematic alignment is possible.
The SETINSROTATION parameters are (where the standard deviation fields are optional):
RBV x_rotation y_rotation z_rotation [x_stdev] [y_stddev] [z_stdev]
The order of rotations is Z-X-Y. All rotations are right handed.
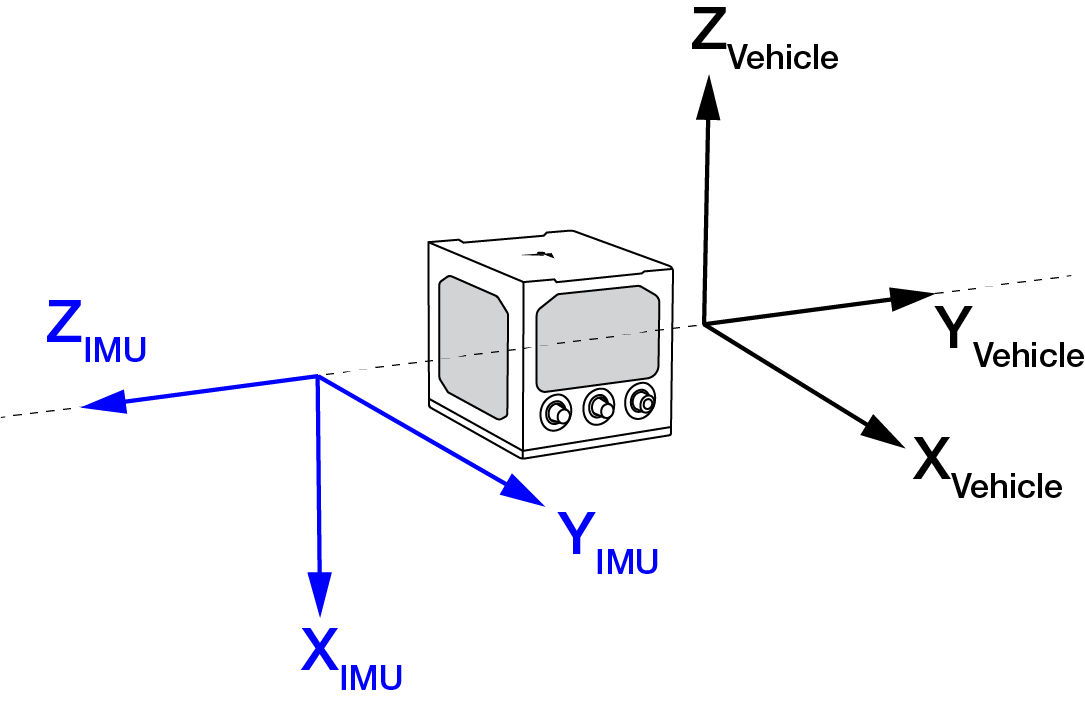
For an example of how to solve for the IMU Body to Vehicle frame rotation refer to Rotational offsets.
If the rotation between the IMU Body frame and the Vehicle frame is not precisely known, enter an approximate rotation (to the nearest 45 degrees). The precise offset can be estimated by carrying out the Body to vehicle frame rotation calibration routine.
SPAN configuration with NovAtel Application Suite
NovAtel Application Suite provides a graphical user interface to help configure a SPAN system. For information about configuring SPAN using NovAtel Application Suite, refer to docs.novatel.com/Tools/Content/ToolsSuite/Overview.htm.
SPAN configuration with Manage Web
The SPAN parameters can be configured using the NovAtel Manage Web User Interface. For information about using Manage Web, refer to docs.novatel.com/Tools/Content/Manage_Web/Overview.htm.