Terrain Compensation
|
Platform: |
SMART7, SMART2-TB |
The Terrain Compensation feature corrects for errors in position caused by the roll and pitch of the vehicle. The SMART Antenna senses the vehicle’s roll and pitch angle and, with the user-entered “height above ground”, compensates the position output to give the position under the vehicle rather than at the antenna.
Vehicle motion is required to compute and obtain terrain-compensated positions.
As shown in Figure: Terrain Compensation – roll and Figure: Terrain Compensation – pitch, if a vehicle is operating on sloped terrain, the position will be in error by an amount proportional to the roll or pitch angles.
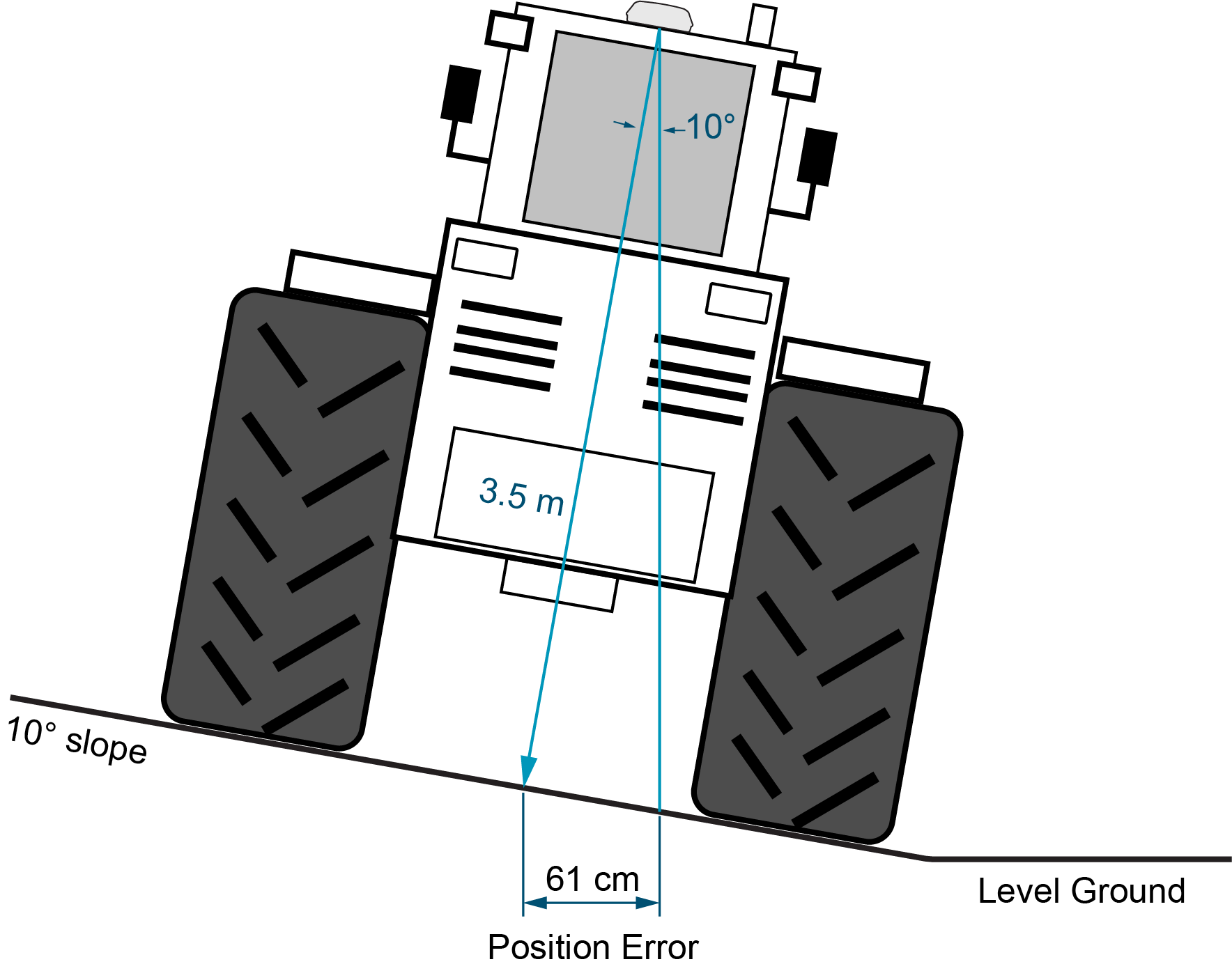
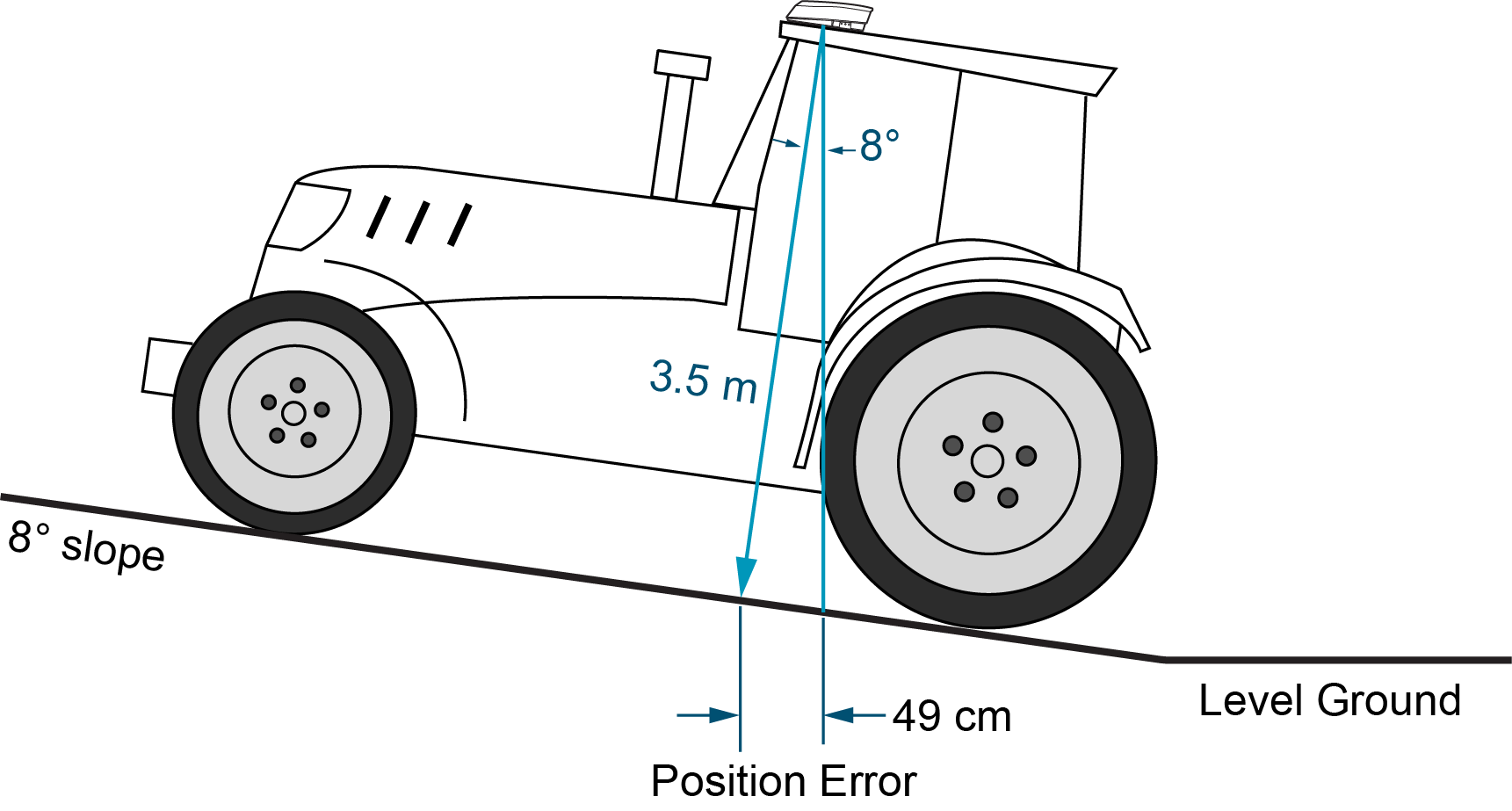
If terrain compensation is enabled, the SMART Antenna determines the roll and pitch angles and corrects the position data before it is forwarded to the user equipment. In the example shown in Figure: Terrain Compensation – roll, the roll angle is 10 degrees, so the position correction that needs to be applied is 61 cm. In the example shown in Figure: Terrain Compensation – pitch, the pitch angle is 8 degrees, so the position error that needs to be applied is 49 cm.
The following logs provide terrain compensated positions:
-
PGN129025 NMEA log
-
PGN129027 NMEA log
-
PGN129029 NMEA log
Terrain Compensation is available on the following SMART Antennas:
-
SMART7-W
-
SMART7-I
-
SMART2-TB
Configuring Terrain Compensation
To fully install and set up Terrain Compensation:
-
Mount the SMART Antenna on the vehicle.
-
Measure and set the height of the SMART Antenna from the ground to the bottom of the antenna.
-
Level the tilt sensor.
-
Save the Terrain Compensation configuration data.
Mount the SMART antenna
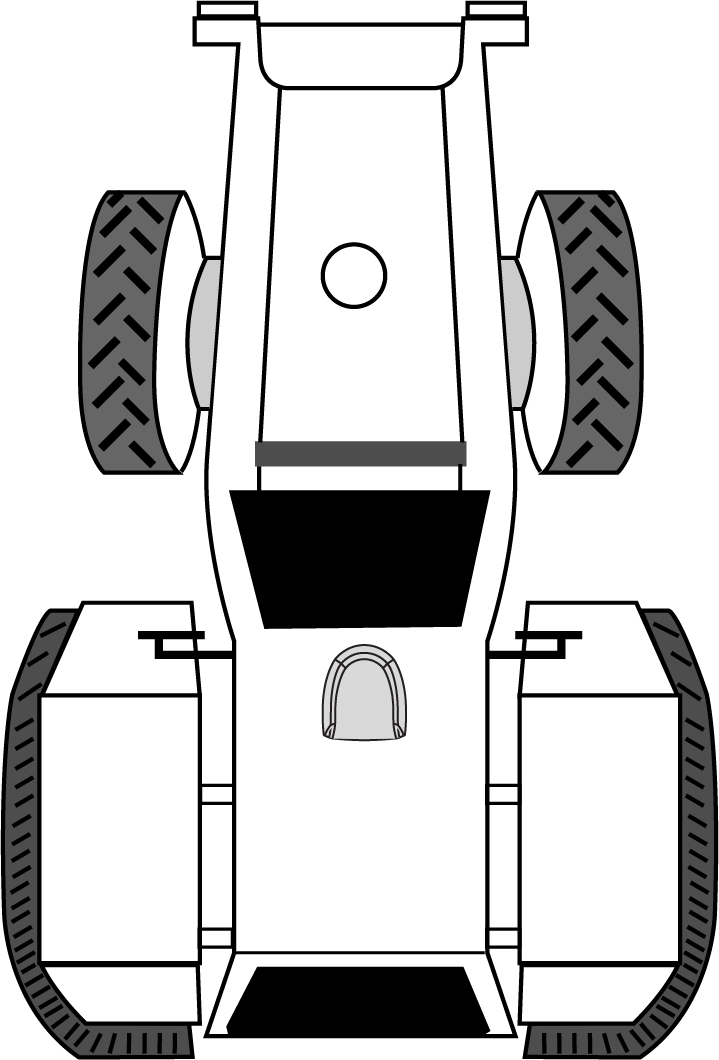
The SMART Antenna must be mounted as close to the centre of the vehicle as possible with the top facing up with an unobstructed view of the sky all around, as illustrated in Figure: SMART antenna installation.
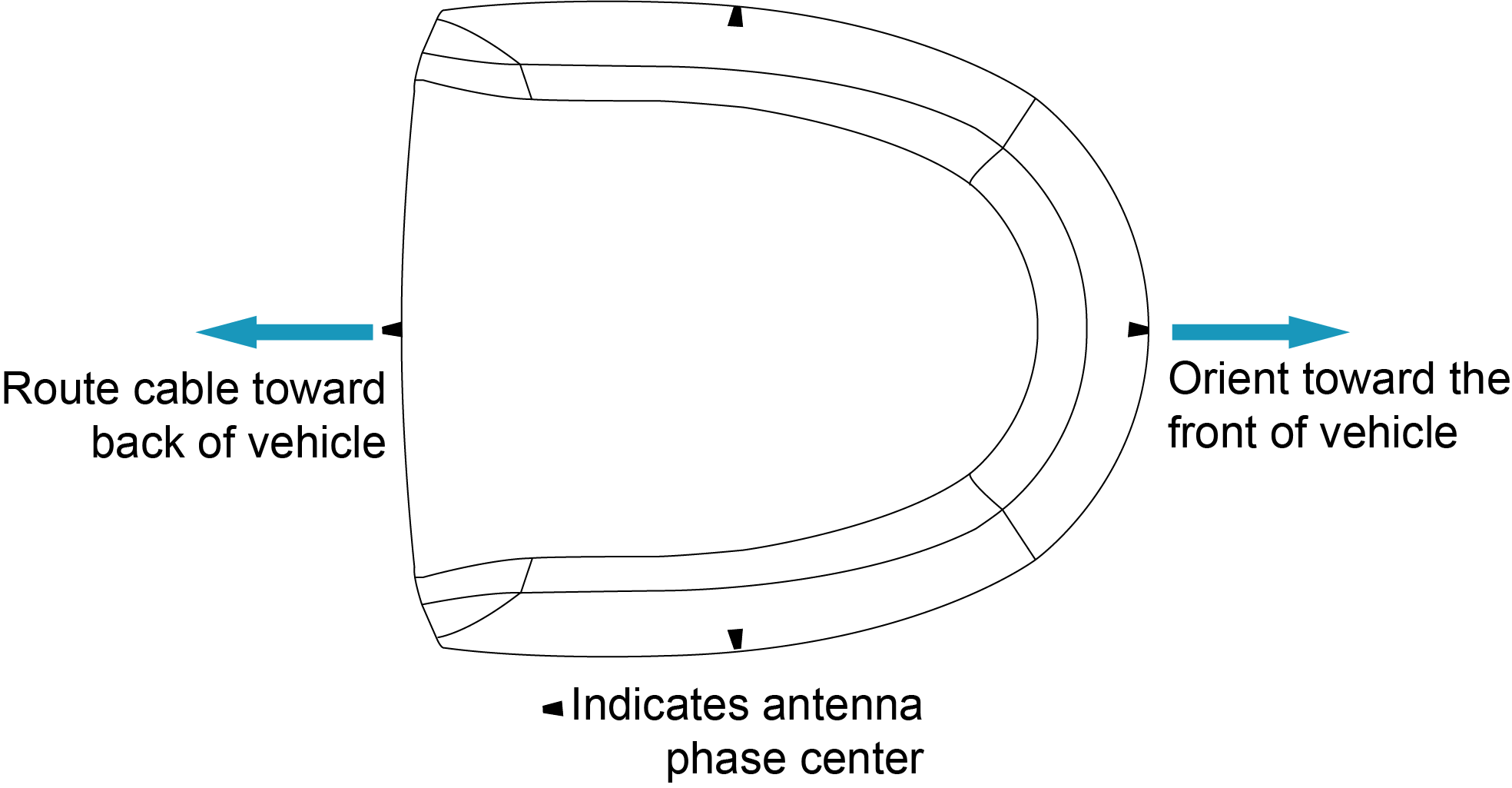
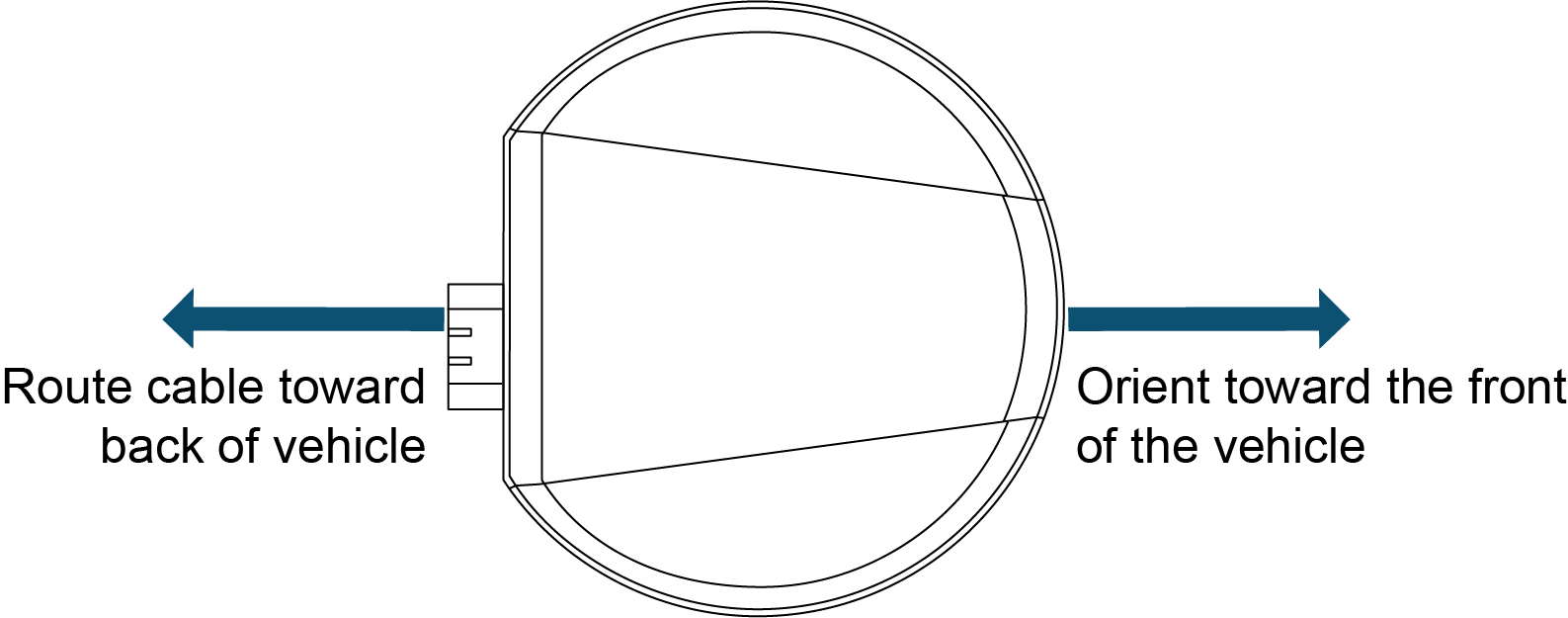
The SMART Antenna must be mounted with the connector facing the rear of the vehicle, as shown in Figure: SMART antenna orientation.
The SMART Antenna must be rigidly secured to the vehicle to minimize errors due to vibration and motion.
Set the SMART antenna height and enable Terrain Compensation
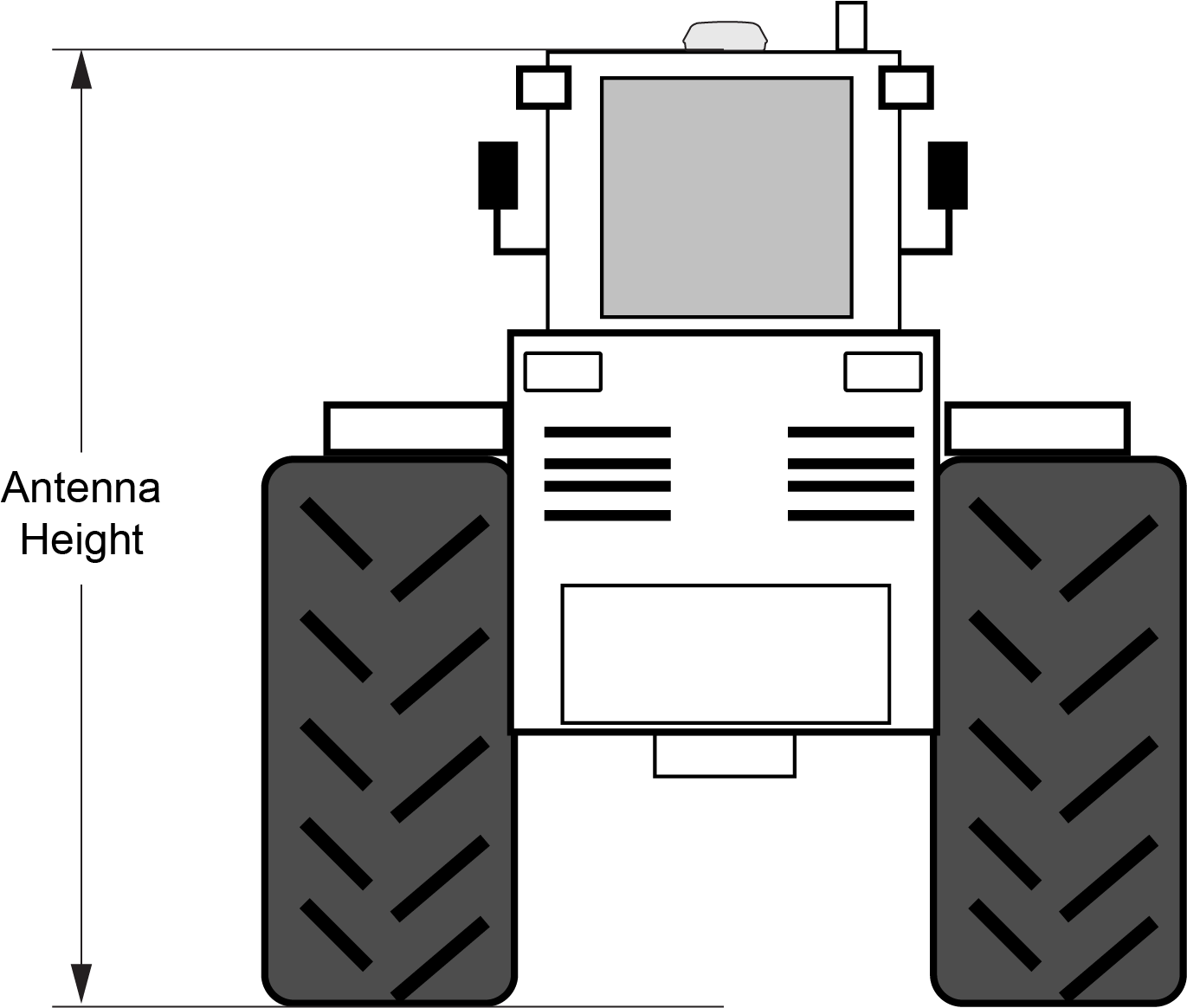
The height measurement should be made while the vehicle has the correct tire pressure and is parked on a hard-packed and level surface. The measurement should be made, in metres, from the ground to the bottom of the SMART Antenna. The measurement accuracy should be within 2.5 to 5.0 cm.
Antenna height measurement
After the measurement has been made, use the TILTFILTER command to set the height of the SMART Antenna.
To set the height in metres:
-
Enter the following command to set the height.
TILTFILTER switch antennaheight
Where:
switch enables or disables Terrain Compensation
antennaheight is the height measurement in metres -
Enter the following command to ensure the height configuration is saved between power cycles.
TILTZERO SAVE
For example, to enable Terrain Compensation and set the SMART Antenna height to 3.5 metres, enter the following command:
TILTFILTER ENABLE 3.5
TILTZERO SAVE
For more information, refer to the TILTFILTER command.
Changes in tire pressure over time can potentially cause errors in Terrain Compensation. This is because the height of vehicle can vary with tire pressure.
The TILTFILTER settings are saved using the TILTZERO SAVE command, not the SAVECONFIG command.
Levelling the Terrain Compensation sensor
Two-stage zeroing should be used to level the Terrain Compensation sensor whenever possible.
Two-stage zeroing
Two-stage zeroing is the best way to level the Terrain Compensation sensor.
Zeroing the Terrain Compensation sensor while moving will negatively impact performance. Always ensure the vehicle is stationary before zeroing the sensor.
Two-Stage zeroing must be completed outside with good GNSS visibility. A level surface is not required.
To level the Terrain Compensation sensor, complete the following:
-
Park the vehicle where you can return to the same location but facing the opposite direction.
-
Ensure that you have good GNSS visibility.
-
Remain stationary for 15 seconds.
-
Begin the zeroing by issuing the following command:
TILTZERO NEW
-
Re-position the vehicle so that it is parked facing the opposite direction on the same spot, as close to 180 degrees as possible.
-
Remain stationary for 15 seconds.
-
Complete zeroing by issuing the following command:
TILTZERO ADD
-
Enter the following command to ensure the zeroing configuration is saved between power cycles.
TILTZERO SAVE
For more information, refer to the TILTZERO command.
Single-stage zeroing
Single-stage zeroing can be used as an alternative to two-stage zeroing.
Zeroing the Terrain Compensation sensor while moving will negatively impact performance. Always ensure the vehicle is stationary before zeroing the sensor.
A known level surface, such as a concrete floor of a shed or workshop, is required to perform the levelling using the single-stage zeroing procedure. GNSS visibility is not required.
To level the Terrain Compensation sensor, complete the following:
-
Park the vehicle on a known level surface.
-
Remain stationary for 15 seconds.
-
Complete zeroing by issuing the following command:
TILTZERO ZERO
-
Enter the following command to ensure the zeroing configuration is saved between power cycles.
TILTZERO SAVE
For more information, refer to the TILTZERO command.
Configuring Terrain Compensation using a NMEA command
Terrain Compensation can also be configured using the NMEA style command, $PMDT.
Using the $PMDT command is an alternative to using the TILTFILTER and TILTZERO commands. Either method will successfully configure the Terrain Compensation feature, however only the single-stage zeroing procedure is supported with the $PMDT command. For best performance, two-stage zeroing is recommended.
Setting the SMART antenna height
The height measurement should be made while the vehicle has the correct tire pressure and is parked on a hard-packed and level surface. The measurement should be made from the ground to the bottom of the SMART Antenna connector. The measurement accuracy should be within 1 to 2 inches (2.5 to 5.0 cm).
After the measurement has been made (in feet and inches, or metres), use the $PMDT command to set the height of the SMART Antenna.
To set the height in feet and inches, enter the following command:
$PMDT,u,,x,y*hh
Where:
x = the feet portion of the height measurement
y = the inches portion of the height measurement
hh = NMEA check sum
For example, entering the command $PMDT,u,,1,1*78 will set the SMART Antenna height to 1 foot and 1 inch.
To set the height in metres, enter the following command:
$PMDT,a,,,,x.x*hh
Where:
x.x = the height measurement in metres
hh = NMEA check sum
For example, entering the command $PMDT,u,,,,2*66 will set the SMART Antenna height to 2 metres.
The SMART Antenna is shipped from the factory with the height set to 0.0 metres.
For more information, refer to the $PMDT command.
Changes in tire pressure over time can potentially cause errors in Terrain Compensation. This is because the height of vehicle can vary with tire pressure.
Levelling the Terrain Compensation sensor
The vehicle must be parked on flat ground when the level command is sent to the SMART Antenna.
To level the Terrain Compensation sensor, enter the following command:
$PMDT,l*4D
For more information, refer to the $PMDT command.
Saving the Terrain Compensation configuration
After the height has been set or the Terrain Compensation sensor has levelled, the Terrain Compensation configuration must be saved. This is done so the height data and level setting are saved between power cycles. To save Terrain Compensation configuration, enter the following command:
$PMDT,x*59
For more information, refer to the $PMDT command.