BESTXYZ
Best available Cartesian position and velocity
|
Platform: |
OEM719, OEM729, OEM7500, OEM7600, OEM7700, OEM7720, PwrPak7, CPT7, CPT7700, SMART7, SMART2 |
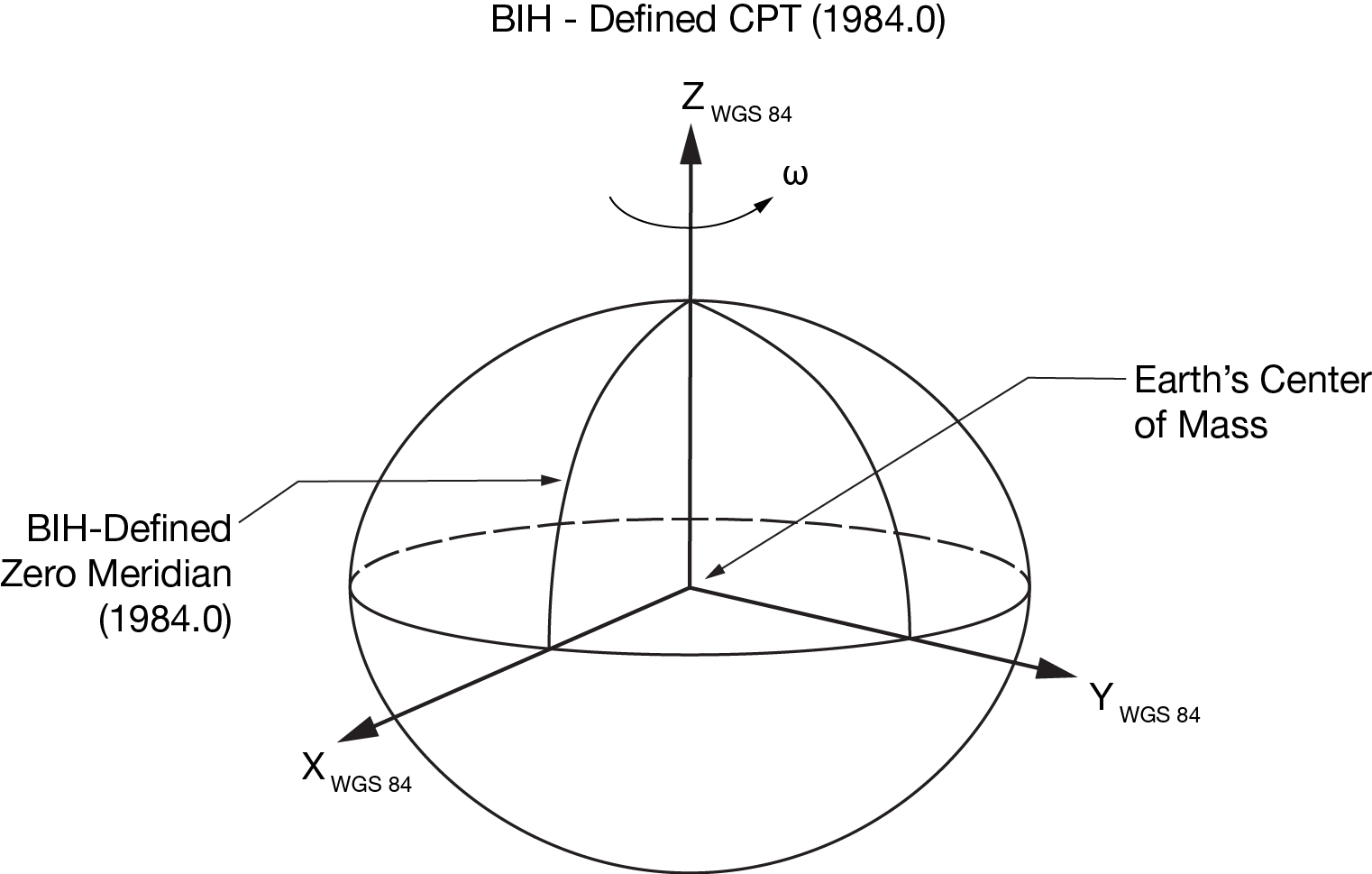
This log contains the receiver’s best available position and velocity in ECEF coordinates. The position and velocity status fields indicate whether or not the corresponding data is valid. See Figure: WGS84 ECEF coordinate system, for a definition of the ECEF coordinates.
See also the BESTPOS log and BESTVEL log.
The position coordinates are provided in the datum configured by the OUTPUTDATUM command.
Message ID: 241
Log type: Synch
Recommended input:
log bestxyza ontime 1
ASCII example:
#BESTXYZA,USB1,0,59.0,FINESTEERING,2209,502264.000,02000020,44cf,16809;SOL_COMPUTED,PPP,-1632848.2165,-3662158.6200,4944901.2721,0.0134,0.0197,0.0259,SOL_COMPUTED,PPP,0.0007,0.0011,0.0009,0.0055,0.0069,0.0103,"TSTR",0.250,14.000,0.000,44,40,40,39,0,00,7f,37*868939b6
|
Field |
Field type |
Description |
Format |
Binary bytes |
Binary offset |
|
1 |
Log header |
BESTXYZ header For information about log headers, see ASCII, Abbreviated ASCII or Binary. |
|
H |
0 |
|
2 |
P-sol status |
Solution status, see Table: Solution status |
Enum |
4 |
H |
|
3 |
pos type |
Position type, see Table: Position or velocity type |
Enum |
4 |
H+4 |
|
4 |
P-X |
Position X-coordinate (m) |
Double |
8 |
H+8 |
|
5 |
P-Y |
Position Y-coordinate (m) |
Double |
8 |
H+16 |
|
6 |
P-Z |
Position Z-coordinate (m) |
Double |
8 |
H+24 |
|
7 |
P-X σ |
Standard deviation of P-X (m) |
Float |
4 |
H+32 |
|
8 |
P-Y σ |
Standard deviation of P-Y (m) |
Float |
4 |
H+36 |
|
9 |
P-Z σ |
Standard deviation of P-Z (m) |
Float |
4 |
H+40 |
|
10 |
V-sol status |
Solution status, see Table: Solution status |
Enum |
4 |
H+44 |
|
11 |
vel type |
Velocity type, see Table: Position or velocity type |
Enum |
4 |
H+48 |
|
12 |
V-X |
Velocity vector along X-axis (m/s) |
Double |
8 |
H+52 |
|
13 |
V-Y |
Velocity vector along Y-axis (m/s) |
Double |
8 |
H+60 |
|
14 |
V-Z |
Velocity vector along Z-axis (m/s) |
Double |
8 |
H+68 |
|
15 |
V-X σ |
Standard deviation of V-X (m/s) |
Float |
4 |
H+76 |
|
16 |
V-Y σ |
Standard deviation of V-Y (m/s) |
Float |
4 |
H+80 |
|
17 |
V-Z σ |
Standard deviation of V-Z (m/s) |
Float |
4 |
H+84 |
|
18 |
stn ID |
Base station identification |
Char[4] |
4 |
H+88 |
|
19 |
V-latency |
A measure of the latency in the velocity time tag in seconds. It should be subtracted from the time to give improved results |
Float |
4 |
H+92 |
|
20 |
diff_age |
Differential age in seconds |
Float |
4 |
H+96 |
|
21 |
sol_age |
Solution age in seconds |
Float |
4 |
H+100 |
|
22 |
#SVs |
Number of satellites tracked |
Uchar |
1 |
H+104 |
|
23 |
#solnSVs |
Number of satellites used in solution |
Uchar |
1 |
H+105 |
|
24 |
#ggL1 |
Number of satellites with L1/E1/B1 signals used in solution |
Uchar |
1 |
H+106 |
|
25 |
#solnMultiSVs |
Number of satellites with multi-frequency signals used in solution |
Uchar |
1 |
H+107 |
|
26 |
Reserved |
Char |
1 |
H+108 |
|
|
27 |
ext sol stat |
Extended solution status (see Table: Extended solution status) |
Hex |
1 |
H+109 |
|
28 |
Galileo and BeiDou sig mask |
Galileo and BeiDou signals used mask (see Table: Galileo and BeiDou signal-used mask) |
Hex |
1 |
H+110 |
|
29 |
GPS and GLONASS sig mask |
GPS and GLONASS signals used mask (see Table: GPS and GLONASS signal-used mask) |
Hex |
1 |
H+111 |
|
30 |
xxxx |
32-bit CRC (ASCII and Binary only) |
Hex |
4 |
H+112 |
|
31 |
[CR][LF] |
Sentence terminator (ASCII only) |
- |
- |
- |
|
Origin = |
Earth's center of mass |
|
Z‑Axis = |
Parallel to the direction of the Conventional Terrestrial Pole (CTP) for polar motion, as defined by the Bureau International de l'Heure (BIH) on the basis of the coordinates adopted for the BIH stations. |
|
X-Axis = |
Intersection of the WGS 84 Reference Meridian Plane and the plane of the CTP's Equator, the Reference Meridian being parallel to the Zero Meridian defined by the BIH on the basis of the coordinates adopted for the BIH stations. |
|
Y-Axis = |
Completes a right-handed, earth-centred, earth-fixed (ECEF) orthogonal coordinate system, measured in the plane of the CTP Equator, 90° East of the X-Axis. |
These definitions are analogous to the BIH Defined Conventional Terrestrial System (CTS), or BTS, 1984.0.