NAVIGATE
User navigation data
|
Platform: |
OEM719, OEM729, OEM7500, OEM7600, OEM7700, OEM7720, PwrPak7, CPT7, CPT7700, SMART7, SMART2 |
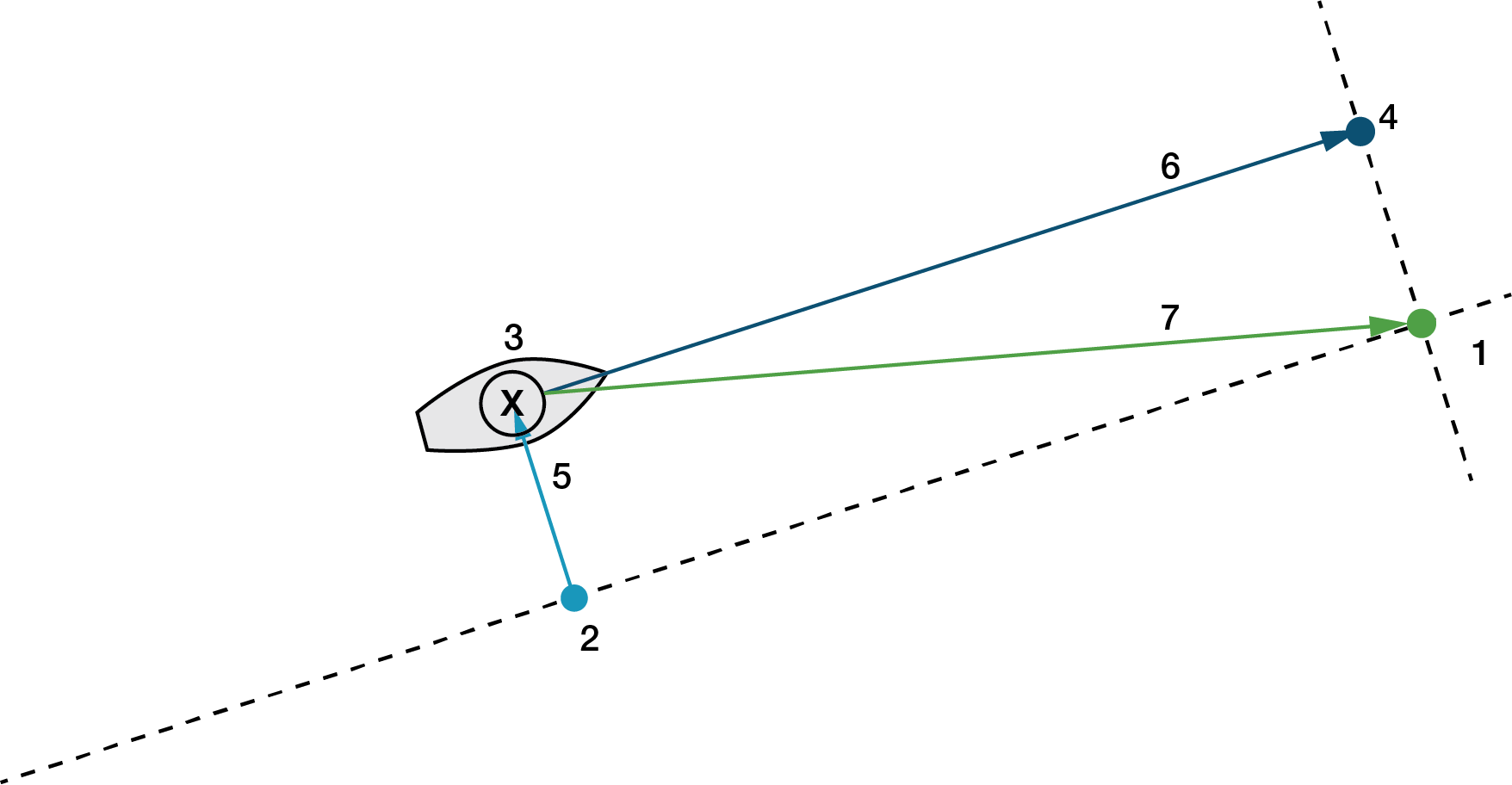
This log reports the status of the waypoint navigation progress. It is used in conjunction with the SETNAV command.
See the figure below for an illustration of navigation parameters.
The SETNAV command must be enabled before valid data will be reported from this log.
|
Reference |
Description |
|
1 |
TO lat-lon |
|
2 |
X-Track perpendicular reference point |
|
3 |
Current GPS position |
|
4 |
A-Track perpendicular reference point |
|
5 |
X-Track (cross track) |
|
6 |
A-Track (along track) |
|
7 |
Distance and bearing from 3 to 1 |
Message ID: 161
Log type: Sync
Recommended input:
log navigatea ontime 1
ASCII example:
#NAVIGATEA,USB1,0,48.0,FINESTEERING,2209,509171.000,12000020,aece,16809;SOL_COMPUTED,PPP,SOL_COMPUTED,NOVELOCITY,8567.8503,279.156559,-3362.2613,8005.7921,9999,0.000*1c71003c
Use the NAVIGATE log in conjunction with the SETNAV command to tell you where you currently are with relation to known To and From points. You can find a specific latitude, longitude or height knowing from where you started. For example, a backpacker could use these two commands to program a user supplied graphical display, on a digital GPS compass, to show their progress as they follow a defined route.
|
Field |
Field type |
Description |
Format |
Binary bytes |
Binary offset |
|
1 |
Log header |
NAVIGATE header For information about log headers, see ASCII, Abbreviated ASCII or Binary. |
|
H |
0 |
|
2 |
sol status |
Solution status, see Table: Solution status |
Enum |
4 |
H |
|
3 |
pos type |
Position type, see Table: Position or velocity type |
Enum |
4 |
H+4 |
|
4 |
vel status |
Velocity status, see Table: Solution status |
Enum |
4 |
H+8 |
|
5 |
nav type |
Navigation data type (see Table: Navigation data type) |
Enum |
4 |
H+12 |
|
6 |
distance |
Straight line horizontal distance from current position to the destination waypoint, in metres (see Figure: Navigation parameters). This value is positive when approaching the waypoint and becomes negative on passing the waypoint. |
Double |
8 |
H+16 |
|
7 |
bearing |
Direction from the current position to the destination waypoint, in degrees, with respect to True North (or magnetic if corrected for magnetic variation by the MAGVAR command). |
Double |
8 |
H+24 |
|
8 |
along track |
Horizontal track distance from the current position to the closest point on the waypoint arrival perpendicular; expressed in metres. This value is positive when approaching the waypoint and becomes negative on passing the waypoint. |
Double |
8 |
H+32 |
|
9 |
xtrack |
The horizontal distance (perpendicular track error), from the vessel's present position to the closest point on the great circle line, that joins the FROM and TO waypoints. If a "track offset" has been entered in the SETNAV command, xtrack is the perpendicular error from the "offset track". Xtrack is expressed in metres. Positive values indicate the current position is right of the Track, while negative offset values indicate left. |
Double |
8 |
H+40 |
|
10 |
eta week |
Estimated GPS reference week number at time of arrival at the "TO" waypoint, along track arrival perpendicular based on current position and speed, in units of GPS reference weeks. If the receiving antenna is moving at a speed of less than 0.1 m/s, in the direction of the destination, the value in this field is "9999". |
Ulong |
4 |
H+48 |
|
11 |
eta secs |
Estimated GPS seconds into week at time of arrival at destination waypoint along track arrival perpendicular, based on current position and speed, in units of GPS seconds into the week. If the receiving antenna is moving at a speed of less than 0.1 m/s in the direction of the destination, the value in this field is "0.000". |
Double |
8 |
H+52 |
|
12 |
xxxx |
32-bit CRC (ASCII and Binary only) |
Ulong |
4 |
H+60 |
|
13 |
[CR][LF] |
Sentence terminator (ASCII only) |
- |
- |
- |