Creating / Modifying a Conversion Profile
Sensor/Timing Settings
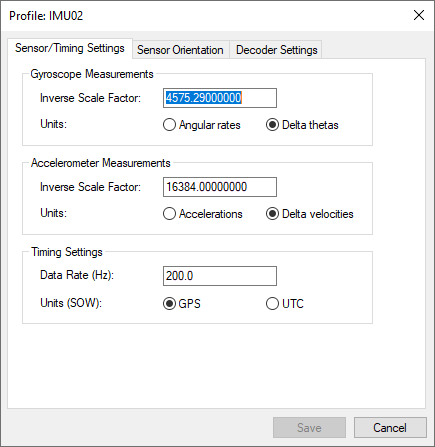
Gyroscope Measurements
Pertains to the measurements made by the gyroscopes.
The inverse value of the scale factor is required. For example, a scale factor of 0.0004, which can be represented fractionally by 1/2500, should be entered as 2500.
The gyro measurements can take the form of delta theta, where angular increments are being observed, or angular rate.
Accelerometer Measurements
Similar to the scale factor of the gyro measurements, the inverse of the accelerometer scale factor is required. As well, the accelerometer measurements can take two forms, the first being Delta velocities, and the other being Accelerations.
Timing Settings
Enter the data collection rate of the IMU sensor and specify the time system (GPS time or UTC time) of the IMU measurements.
Sensor Orientation Settings
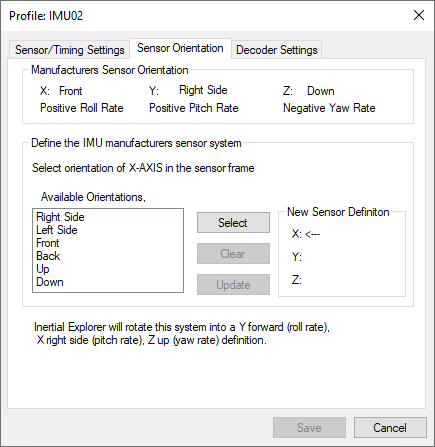
Define the orientation of the IMU here using the steps below.
The orientation will always be right-handed.
How to define the orientation of the IMU
-
Specify the X-direction by selecting the direction that corresponds to the X-axis of the sensor frame.
-
Click Select to set that direction to the X-axis.
-
Specify the Y-direction by selecting the direction that corresponds to the Y-axis of the sensor frame.
-
Click Select to set that direction to the Y-axis.
Given the constraint that the frame is right-handed, the z-axis direction will be automatically determined by the software.
-
Click Update to apply the new sensor orientation to the profile.
If a mistake is made at any point during the process, click Clear to start over.
-
Click Save to save the new profile.
It should immediately appear in the scroll-down list under the IMU Profiles box of the main window.
Decoder Settings
Specifies which library is used to perform the conversion, based on the input format of the raw data file. For most sensors, this should be left untouched.
For SPAN, the IMU decoding is handled through the GNSS decoder.