Measurement
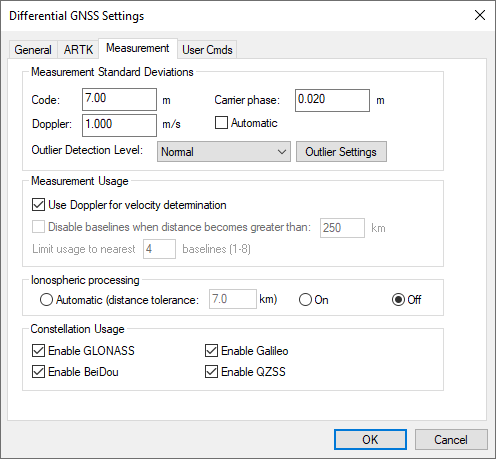
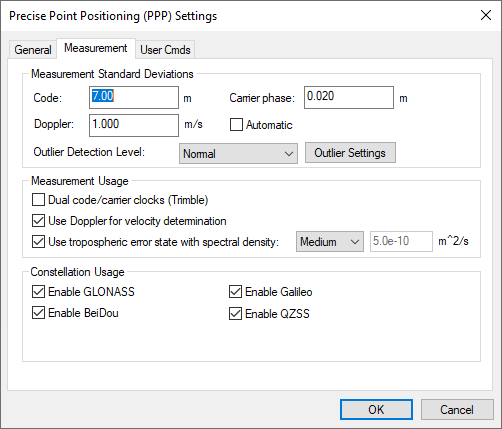
Measurement Standard Deviations
Sets the measurement standard deviations applied to code, carrier and Doppler measurements.
Code (Not with AR enabled)
Controls the measurement weighting applied to the double differenced C/A measurements. Regardless of what value is entered here, if ARTK is used to fix integer carrier phase ambiguities, the C/A measurement standard deviation will not significantly impact results. This is because when ambiguities are fixed, the strength of the solution comes from the carrier phase. The C/A measurement weighting can affect float solution convergence and is one of the most effective setting available for optimizing float trajectories.
Carrier phase (Not with AR enabled)
Controls the measurement weighting applied to the double differenced carrier phase measurements. This value is automatically increased if ionospheric processing is engaged. Also, an additive PPM value is applied to account for increased noise as the baseline distance increases.
Doppler
Doppler is the instantaneous rate of change of the carrier phase signal as measured in the receiver. Doppler is used to calculate instantaneous velocity. Inertial Explorer assigns a relatively conservative measurement weighting of either 1.0 m/s or 0.25 m/s depending on the receiver manufacturer. Inertial Explorer uses a conservative weighting as the quality of Doppler measurements vary significantly from one receiver manufacturer to another. Nonetheless, if a large number of Doppler errors are reported to the processing dialogs and message log files, consider increasing the weighting after viewing the RMS - Doppler plot or disengage the option to Use Doppler for velocity determination within the Measurement Usage settings.
Outlier Detection Level (Not with AR enabled)
Inertial Explorer attempts to automatically reject satellites or measurements when large measurement residuals are detected. If a large residual is detected, Inertial Explorer systematically rejects each satellite individually and recalculates the position and residual. If the new residual is significantly lower than the original residual, the satellite is automatically removed from the solution at that epoch. Inertial Explorer’s sensitivity to high measurement residuals is controlled through this setting.
Measurement Usage
Dual code/carrier clocks (PPP only) (Not with AR enabled)
This option engages the use of separate clock states for the code and carrier measurements. Whether this option should be engaged is completely dependent on receiver design. It is most often needed for Trimble receivers, so this option is automatically engaged if the remote receiver is detected to be Trimble. If this option is not used when needed, typically, results are obviously degraded.
Use Doppler for velocity determination
If engaged, Doppler is used to derive instantaneous velocity. If many Doppler measurement errors are output to the Inertial Explorer processing dialog, it may indicate the Doppler measurement quality of your receiver is very poor. In this case, it is recommended you disable this option or increase the measurement SD upwards.
Disable baselines when distance becomes greater than (Differential processing only)
This option is used to automatically disable base stations according to baseline length. This is an effective means of managing base station data use in large project areas.
Limit usage to nearest # baselines (Differential processing only)
This option determines the maximum number of base stations used simultaneously. In the initial release of Version 9.00 and earlier versions, this value was internally set to 8. You can now significantly speed up processing by lowering this value, as this will reduce the computational load. Compared to using a value of 8, Waypoint's testing shows that processing times can be reduced by up to 75% when using the new default of 4, and up to 95% when using 1. Like most settings, changing this value can impact the results for better or worse, although testing has shown that the results are nearly identical with 4, and very comparable with lower values. For most applications, a value of 2 is the recommended minimum in order to facilitate a smooth transition between Kalman filter states when base stations change, but corridor-like applications have been tested successfully with the minimum value of 1.
Use tropospheric error state (PPP processing only) (Not with AR enabled)
As no base station data is used to reduce correlated errors, such as tropospheric delay, this must be solved as an additional state within the PPP filter. The tropospheric spectral density controls how fast Inertial Explorer allows the tropospheric state to change. Medium is suitable for most projects, but High may work better if very fast and frequent changes in elevation are expected in your survey. High allows the tropospheric conditions to change more rapidly within the filter.
Ionospheric Processing (Differential processing only)
Ionospheric processing requires dual frequency data. It helps maintain GNSS positioning accuracy with increasing baseline length. The ionosphere can be a significant error source for L1 only processing as it is highly variable and can change rapidly.
Ionospheric processing essentially removes the ionospheric delay as an error source, however does so at the cost of higher measurement noise. Thus, best results are achieved on short baseline lengths when ionospheric processing is disabled. However when the baseline distance becomes large, the benefits of correcting for the ionosphere out-weigh the increased noise and best results are achieved when enabling this option.
In order to handle both scenarios, Inertial Explorer has an Automatic setting that will turn on or off ionospheric processing depending on the length of the baseline detected in the project. Prior to processing, the unprocessed positions in the remote GPB file are compared with the base station position. If more than 10% of the trajectory exceeds the distance tolerance, ionospheric processing is engaged.
In addition to Automatic, ionospheric processing can also be explicitly turned on or off.
Constellation Usage
Inertial Explorer supports GPS, GLONASS, BeiDou, Galileo and QZSS within the differential and PPP processors.
GPS, by default, is always engaged in PPP and differential processing and does not appear in the list of constellations you can enable/disable. If data from other constellations are detected within the project, they will appear here and may be omitted from the project by deselecting the check box.
Waypoint software offers the ability to switch the secondary frequency used in processing with a user cmd. This can be changed for both differential processing and PPP processing using the commands SECONDARY_FREQ_SRC and PPP_SECONDARY_FREQ_SRC respectfully. For which signals are used by default and as replacements, refer to Table: Secondary Frequency Used.
*For each slot (primary or secondary), only one signal will be used per constellation. In differential processing, the software will automatically choose by scanning the remote and base station data to determine which signal is more prevalent. In PPP processing, B1I will be preferred over B1C for any satellite tracking both. Similarly, B2B will be preferred over B2A.