GNSS (IE/IEX only)
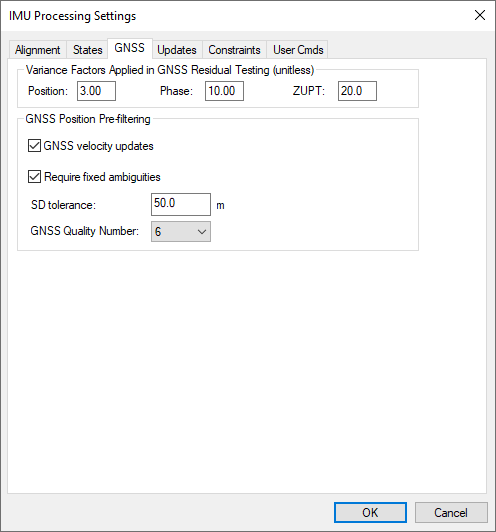
Variance Factors Applied in GNSS Residual Testing
Inertial Explorer performs residual testing using a standard least squares approach on every type of update applied within our Kalman filter. Phase updates are only applied when there are a minimum of two satellites available in TC processing.
Updates are accepted only if the computed residual is within the set tolerance. The larger the variance factor tolerance, the less likely an update is to be rejected by residual testing. For this reason, large values are typically applied in aerial processing profiles in order to reduce the chances of false rejection and lower thresholds are applied in ground vehicle profiles in order to lessen the likelihood that a biased update will be accepted. It is safe to use large values in clean GNSS environments where the quality of GNSS data is good, however lower values (1-3) are recommended when surveying in challenging GNSS environments.
GNSS Position Pre-filtering
GNSS velocity updates
GNSS velocity updates are important, especially when a kinematic alignment is performed. As such, this option is normally engaged. However, for any special applications where GNSS velocity updates are to be rejected, they can be disabled here.
Require fixed ambiguities
If using a high precision IMU and when surveying in urban conditions with some challenging GNSS data, this option may be useful in achieving the best possible results. This option is not recommended for most systems (MEMS or tactical grade IMUs) as any GNSS updates (even one derived from float ambiguities) are generally beneficial in observing IMU sensor errors.
SD tolerance
If the position update returned by the GNSS processor is larger than this value, it will not be passed to the IMU filter. By default a large threshold is used as Inertial Explorer relies on variance factor testing to determine whether a GNSS position update should be applied or not.
GNSS quality number
The GNSS processing engine assigns a quality number to each processed epoch between the values of 1 to 6, 1 being the best. By default Inertial Explorer does not use the GNSS quality number in pre-filtering as instead it relies on GNSS variance factor testing in determining whether a GNSS position update should be accepted. If you wish to enable a lower prefiltering tolerance, enter it here.