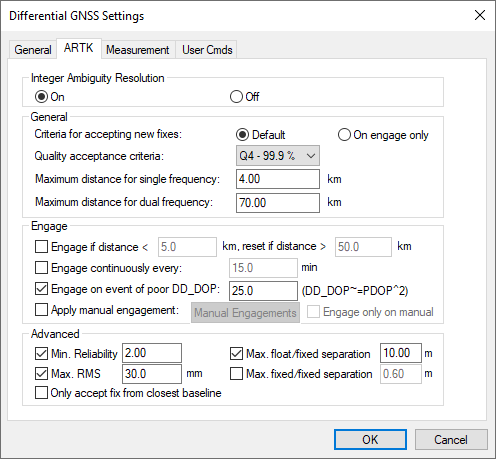
ARTK Options (Differential GNSS processing only)
ARTK (AdVance RTK) is NovAtel's method of resolving integer carrier phase ambiguities. ARTK is engaged by default and should be attempted in high accuracy applications, whenever cm level results are required.
Dual frequency ARTK provides fast, reliable and robust performance. However, in high multipath environments or where the satellite geometry is marginal, the possibility of an incorrect ambiguity fix exists. This is why it is important to access Inertial Explorer's quality control plots which will help detect errors.
|
|
Both single and dual frequency ARTK require at least 5 satellites, but 7 or more are preferable. |
Integer Ambiguity Resolution processing option settings
On
Engages ARTK for both single and dual frequency data processing.
Off
Disables ARTK. This will produce a float solution.
General
Criteria for accepting new fixes
ARTK can be used in Default or On engage only modes. These modes are described below.
Default
When ARTK is used in default mode, it is constantly re-checking its solved ambiguities when the satellite geometry changes (i.e. when new satellites come into the solution or when individual satellites are lost). Thus it is possible, even under open sky conditions where no loss of lock occurs, that ARTK will accept a new set of integer ambiguities when there is a change in satellite geometry. This may result in a position jump where the new ambiguities are accepted.
Using ARTK in default mode is thus mostly preferred for ground vehicle applications, as this method provides a high level of solution accuracy over the entire length of a trajectory.
On engage only
This method ensures ARTK engages only at startup, when a complete loss of lock occurs, or after a period of poor satellite geometry. This method is generally preferred for aerial applications as it ensures that new ambiguity fixes are not accepted in the middle of a flight line, where position jumps may be problematic.
Quality acceptance criteria
This is the confidence level required in residual testing for an ARTK fix to be accepted. Using lower quality acceptance criteria increases both the likelihood of achieving a fix and the possibility the fix may be incorrect. Conversely, increasing the quality acceptance criteria helps reduce the likelihood of incorrect ambiguity fixes, but also the chance that no fix is achieved when conditions are marginal for ambiguity determination.
The default criteria applied in all manufacturer processing profiles is the highest possible setting, Q4 (99.9%). This is set purposefully conservative to help guard against the worst-case scenario of an incorrect set of ambiguities being accepted. In this case, the standard deviation of the solution will be cm-level, however there may be meter-level error in the solution. It is important to view the Combined Separation with Fixed Ambiguity plot to help identify any incorrectly fixed solutions.
The quality acceptance criteria provides a level of control over ARTK performance. However advanced settings can also be applied, including the minimum reliability, maximum RMS, maximum float/fixed separation and maximum fixed/fixed separation.
Maximum Distance
The distance tolerance for engaging ARTK for both single and dual frequency can be defined here. The default values applied are high, and therefore are more often lowered than increased.
If your project involves a long flight to or from the project area, and your base station is operating in the project area, it is generally beneficial to lower the distance threshold to 30 km or less. This will prevent ARTK from engaging itself unnecessarily far from your project area, which increases the likelihood of an incorrect ambiguity fix.
Engage Options
These options control when ARTK is engaged.
Engage if distance < tolerance1, reset if distance > tolerance2:
The first tolerance is used to automatically re-engage ARTK on approach to any new base station. The remote must exceed the second tolerance for ARTK to re-engage when re-approaching the same base station. This option, specifically the first tolerance, is useful in multi-base, corridor-type projects.
Engage continuously every:
Engages ARTK at regular intervals. This option does not check other criteria, such as baseline length or data quality. Thus, it should only be used in slow moving or monitoring applications.
Engage on event of poor DD_DOP:
It is possible to maintain a fixed integer solution through an event which causes poor satellite geometry, provided carrier phase lock is maintained on four or more satellites. When satellites are re-acquired, their carrier phase ambiguities are not automatically re-established as fixed integer solutions. Thus, it is possible that following a period of poor geometry, more satellites in the solution have float ambiguities than fixed. This will not necessarily result in degraded accuracy, but re-establishing all satellites with fixed ambiguities is generally beneficial to maintaining high accuracies.
Apply Manual Engagement
A manual ARTK engagement forces Inertial Explorer to re-establish carrier phase ambiguities. Introducing a manual engagement is one technique to recover from an incorrect or drifting ambiguity fix. These instances (incorrect or drifting ambiguity fixes) can be identified from the forward/reverse separation plots. If the Engage only on manual setting has not been enabled, Inertial Explorer will compute a float solution only until a manual ARTK engage time is reached, at which point Inertial Explorer will attempt to resolve integer carrier phase ambiguities.
Advanced
These options provide advanced users more control over ARTK performance and more tools when reprocessing problematic surveys. By default, conservative values are applied in all manufacturer processing profiles only to provide sanity checks on the values returned by ARTK.
Min. Reliability:
The reliability of an ARTK fix is the ratio of the second best RMS and the best RMS. It indicates how much better, statistically, the best solution is from the second best solution. High reliability values indicate the best RMS is significantly better (lower) than the second best RMS, and thus a high degree of confidence can be placed in the solution. This option provides direct control over the minimum reliability ARTK will accept as a pass.
Max. RMS:
An RMS is computed for every possible ARTK fix within a given search area. This RMS, output by Inertial Explorer in units of mm, represents the mathematical fit of the solution or how well the carrier phase measurements in the solution agree with each other. Low values (mm level or sub-mm) represent well fitting solutions, or measurements that agree very closely. Large values (cm level) indicate poorer fitting solutions that are more suspect. This option provides direct user control over the maximum allowable RMS for an ARTK fix to be considered a pass.
Max. float/fixed separation:
Using this option forces the float solution to converge within a specified distance prior to a fix being accepted. This value is usually dependent on the time used by ARTK to fix. If only seconds of data are used, the float solution is likely to be meters away from the fixed. This would be normal and not indicative of a problem. If several minutes of data are used prior to fixing, the float solution may have converged to within a decimeter-level value. Nonetheless, fixed ambiguities with excessively large float/fixed separate values are suspect and large values may indicate heavy multipath conditions.
Max fixed/fixed separation:
This option is of significance when ARTK is used in Default mode. In this mode, ARTK is constantly re-checking its carrier phase ambiguities as the satellite geometry changes. When a new fixed integer solution is obtained, the position computed with the new set of fixed ambiguities is compared to the position computed from the previous set of fixed ambiguities and the difference is reported as the fixed/fixed separation. Fixed solutions with large fixed/fixed differences may be suspect, and users can directly control how different a new set of fixed integer ambiguities can be from the current. It is recommended not to set this value too low, as it may prevent Inertial Explorer from fixing.
Only accept fix from closest baseline:
In multi-base processing, ARTK uses data from all base stations within the distance tolerance under the General ARTK options and chooses the best fix (statistically). As such, the closest base station will not necessarily be the one which has fixed ambiguities. This option is available should users desire or require to only accept fixed integer solutions from the nearest baseline. This option is not engaged by default as in general it does not produce best results.