Mathematical Equations Used with Boresighting
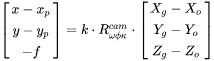
This section provides information regarding the equations used by the boresighting module. The photogrammetric equation is typically presented as Equation 1.
Equation 1
|
Where: |
x,y |
image coordinates |
|
|
xp, yp |
principal point offset |
|
|
f |
focal length |
|
|
k |
scale factor |
|
|
Xg, Yg, Zg |
ground coordinates |
|
|
Xo, Yo, Zo |
perspective center coordinates |
The boresighting feature solves for a rotation required in the derivation of the  matrix, which represents the attitude of the image coordinate system with respect to the ground coordinate system. This matrix is defined through Equation 2.
matrix, which represents the attitude of the image coordinate system with respect to the ground coordinate system. This matrix is defined through Equation 2.
Equation 2

Inertial Explorer’s boresighting module provides the rotation angles that form the ΔRwok matrix. The other rotation matrix,  , is computed from Equation 3. In this equation, Rc accounts for the different axes definition between the camera and the IMU.
, is computed from Equation 3. In this equation, Rc accounts for the different axes definition between the camera and the IMU.
Equation 3

In general, when a conventional image frame is employed, the Rc is computed by Equation 4.
Equation 4

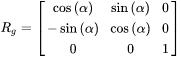
The quantity Rg corrects for the map convergence and is computed by Equation 5.
Equation 5
|
Where: |
α |
is the difference between grid north and true north |
The final quantity required to solve for  is Rrpy, which represents the rotation required to orientate the IMU into the ground coordinate system and is computed by Equation 6.
is Rrpy, which represents the rotation required to orientate the IMU into the ground coordinate system and is computed by Equation 6.
Equation 6

|
Where: |
r |
roll angle |
|
|
p |
pitch angle |
|
|
y |
yaw angle |
yaw = –heading
It is also useful to present the matrix required to rotate a ground coordinate system into an alternate coordinate system. This matrix is defined through Equation 7.
Equation 7
