Distance Measurement Instrument
|
Platform: |
OEM719, OEM729, OEM7500, OEM7600, OEM7700, OEM7720, PwrPak7, CPT7, CPT7700 |
A Distance Measurement Instrument (DMI) can provide additional accuracy and reliability to a NovAtel SPAN solution. Specifically, a DMI can help constrain INS position and azimuth error growth during GNSS outages. The lower the IMU grade, the greater the DMI will help in constraining INS error drifts.
Typically, a DMI measures the distance travelled and represents the measurement using digital pulses. For a land vehicle, where a DMI is also known as a wheel sensor (odometer), the pulses are referred to as wheel ticks. If the pulses are accumulated and the size of the wheel known, a displacement of the wheel over time can be calculated. The SPAN system takes in a DMI input and applies a displacement update to the GNSS+INS Kalman filter in order to constrain the position error growth during GNSS outages. SPAN also automatically estimates the size of the wheel to mitigate small changes in the size of the wheel due to hardware changes or environmental conditions.
A DMI with a higher accuracy will have more wheel ticks per revolution. For example, assume a wheel with a circumference of 2 metres and a DMI rated for 1000 ticks per revolution. The DMI will output 1000 pulses per complete revolution of the wheel. The resulting precision will be 0.002 m/tick. Given the same wheel, but a DMI rated for 10 ticks per revolution, the resulting precision will be 0.2 m/tick.
DMI communication
There are three methods a DMI can use to encode data.
-
Pulse
This method uses a single channel, single-ended signal and is represented by A+. Most NovAtel products require conversion to a differential signal. -
Differential
This method uses a single channel with a pair of complementary signals represented as A+ and A-. Differential signals resist electromagnetic (EM) noise and improve robustness in challenging electrical environments compared to a single-ended pulse. -
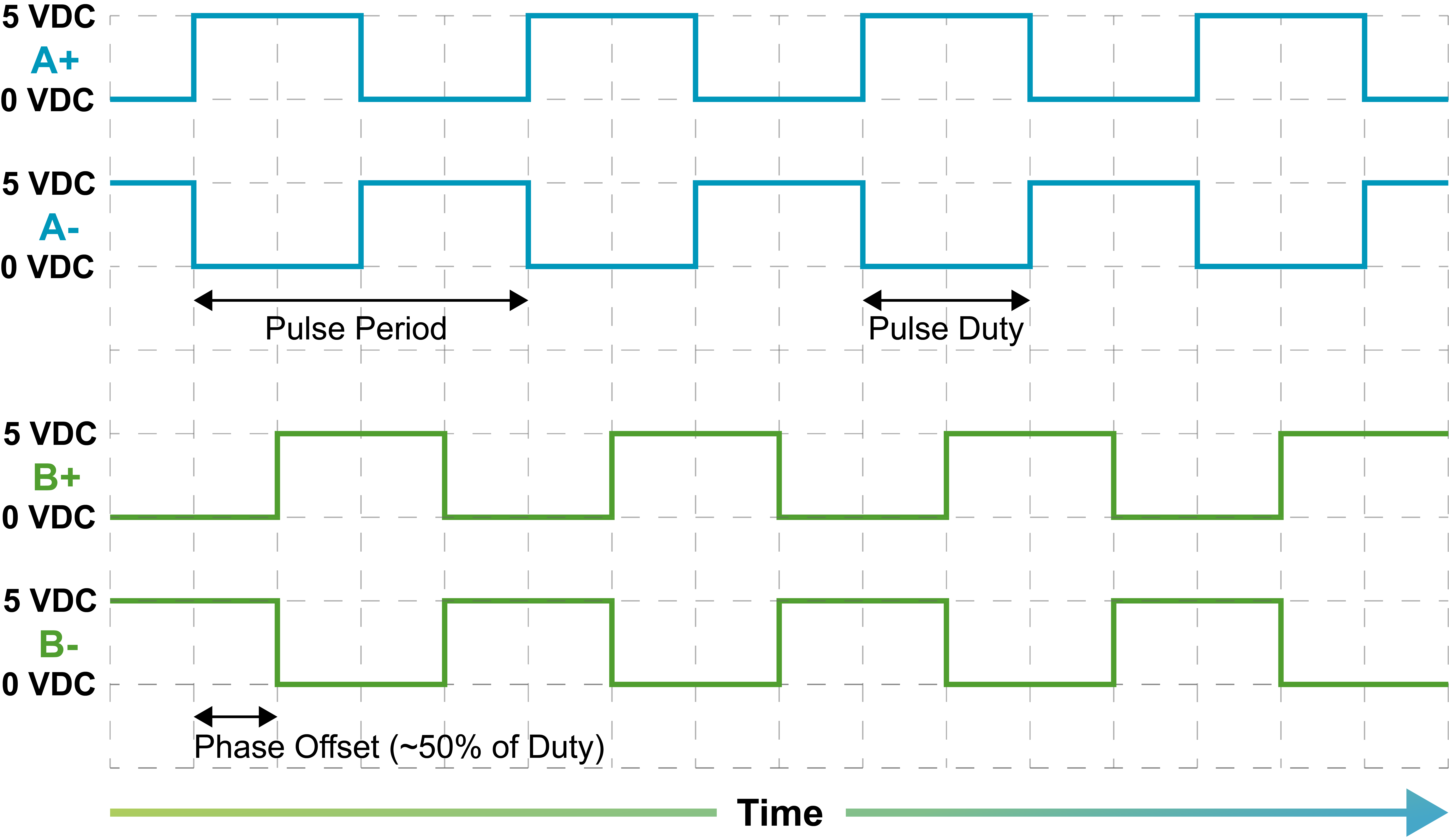
Quadrature:
This method uses two channels, where there are two pairs of complementary signals represented as A+/A- and B+/B-. Each pair is offset with respect to one another by 90 degrees. The B signals provide directionality to the count measurements. By determining the directionality, this results in a more stable DMI update to the SPAN solution when compared to a single channel configuration. The differential pair improves robustness in challenging electrical environments.Wheel sensor pulses (dual channel, quadrature, RS-422 differential)
As quadrature encoding is a widely used DMI data transmission method, it is supported on most NovAtel SPAN-enabled products with DMI capability.
NovAtel SPAN-enabled products that support quadrature encoding also accept a single channel DMI input. In the case of a single channel, only the A+/A- differential wire pair is connected. A single channel provides benefit to the SPAN solution by measuring only the distance travelled without regard for direction.
DMIs that use the
DMI connection
Depending on the SPAN system components, the DMI can be connected to a PwrPak7, a CPT7, an IMU, a UIC or an intermediate processor.
-
PwrPak7
For a SPAN system with a PwrPak7, the DMI can be connected to the HD26 COM PORTS connector on the PwrPak7.
For information about connecting and configuring a DMI connected to a PwrPak7, see DMI connected to a PwrPak7. -
CPT7
For a SPAN system with a CPT7, the DMI can be connected to the DMI input on the IO2 connector. For information about connecting and configuring a DMI to a CPT7, see DMI connected to a CPT7.
-
IMU Enclosure
For a SPAN system with an IMU-HG1900, IMU-ISA-100C, IMU-LN200 or IMU-µIMU-IC, the DMI can be connected to the Wheel Sensor port on the IMU enclosure.
For information about connecting and configuring a DMI connected to an IMU, see DMI connected to an IMU. -
Universal IMU Controller (UIC)
For a SPAN system that uses a UIC to connect the IMU to the receiver, the DMI can be connected to the UIC.
For information about connecting and configuring a DMI connected to a UIC, see DMI connected to a UIC. -
Intermediate processor
NovAtel’s OEM7 receiver cards do not handle DMI encoded signals natively. If using a receiver card, an intermediate processor is required to convert DMI pulses into NovAtel commands (RAWDMI).
For information about connecting and configuring a DMI connected using an intermediate processor, see DMI connected to an intermediate processor.