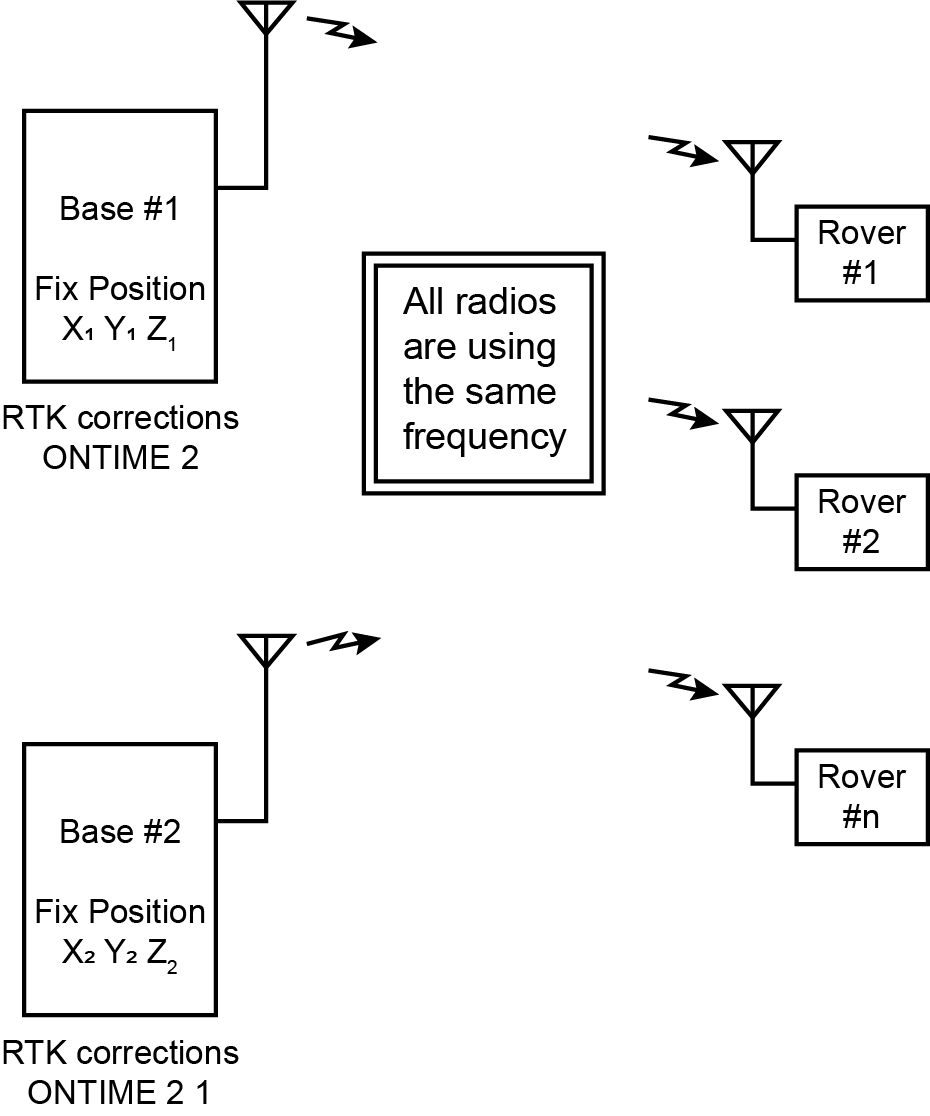
Multi-base RTK setup with single-frequency radio link
|
Platform: |
OEM719, OEM729, OEM7500, OEM7600, OEM7700, OEM7720, PwrPak7, CPT7, CPT7700, SMART7 |
When setting up a multi-base RTK solution using radios to transmit the RTK corrections, each base station would normally be assigned its own unique radio frequency so rovers can select a base station by tuning in to its frequency. This can also be done when the base stations are sharing the same radio frequency by using time slots in which the base stations send their RTK corrections.
Base stations using different base station IDs
When the base stations are using different base station IDs, the rover receivers will be able to recognize a specific base station by its unique base station ID. A rover that connects to the network will start listening to the RTK transmissions and will select the base station it receives its first set of correction data from. The rover will keep using this base station as long as it is able to receive the RTK transmissions from this base station. When the rover is no longer able to receive the transmissions from the base station it is connected to, it will keep using the last valid set of RTK corrections received from that base station, until the age of data exceeds the value set by the RTKTIMEOUT command. The rover solution will fall back to either DGPS or single point, but the rover will not start looking for an alternative RTK source until the value set by the RTKSOURCETIMEOUT command has been exceeded as well. Once the RTKSOURCETIMEOUT value has been reached, the rover will accept the first new set of correction data it receives and it will start using the base station from which this new set of correction data was received. This can be seen in the station ID fields of the GPGGA log and BESTPOS log.
The data below shows the behaviour of a rover in a setup in which two base stations (base #1 with station ID 2001 and base #2 with station ID 2002) are transmitting their correction data. The rover was initially connected to base #1, but lost the connection to that base station around GPS time 470747. The RTKTIMEOUT and RTKSOURCETIMEOUT were both set to 10 seconds. As can be seen, the rover will go to a single point solution before it switches base stations.
#BESTPOSA,ICOM1,0,81.5,FINESTEERING,1970,470745.000,02000000,b1f6,14307;SOL_COMPUTED,NARROW_INT,52.02841401694,4.69047319010,6.6481,43.4000,WGS84,0.0078,0.0065,0.0191,"2001",1.000,0.000,23,19,19,19,00,21,30,37*5c4f8a2d
#BESTPOSA,ICOM1,0,82.0,FINESTEERING,1970,470746.000,02000000,b1f6,14307;SOL_COMPUTED,NARROW_INT,52.02841403051,4.69047322861,6.6564,43.4000,WGS84,0.0090,0.0076,0.0222,"2001",2.000,0.000,23,19,19,19,00,21,30,37*02c0ea4f
#BESTPOSA,ICOM1,0,82.0,FINESTEERING,1970,470747.000,02000000,b1f6,14307;SOL_COMPUTED,NARROW_INT,52.02841402271,4.69047319479,6.6508,43.4000,WGS84,0.0078,0.0065,0.0191,"2001",1.000,0.000,23,19,19,19,00,21,30,37*ed5f8927
#BESTPOSA,ICOM1,0,82.5,FINESTEERING,1970,470748.000,02000000,b1f6,14307;SOL_COMPUTED,NARROW_INT,52.02841404517,4.69047322714,6.6542,43.4000,WGS84,0.0090,0.0076,0.0221,"2001",2.000,0.000,22,18,18,18,00,21,30,37*60a98296
#BESTPOSA,ICOM1,0,82.5,FINESTEERING,1970,470749.000,02000000,b1f6,14307;SOL_COMPUTED,NARROW_INT,52.02841404313,4.69047321422,6.6510,43.4000,WGS84,0.0100,0.0086,0.0248,"2001",3.000,0.000,22,18,18,18,00,21,30,37*8e925747
#BESTPOSA,ICOM1,0,82.5,FINESTEERING,1970,470750.000,02000000,b1f6,14307;SOL_COMPUTED,NARROW_INT,52.02841406037,4.69047323184,6.6543,43.4000,WGS84,0.0110,0.0094,0.0272,"2001",4.000,0.000,22,18,18,18,00,21,30,37*135ce83a
#BESTPOSA,ICOM1,0,78.0,FINESTEERING,1970,470751.000,02000000,b1f6,14307;SOL_COMPUTED,NARROW_INT,52.02841404843,4.69047323201,6.6527,43.4000,WGS84,0.0118,0.0103,0.0294,"2001",5.000,0.000,22,18,18,18,00,21,30,37*660fe205
#BESTPOSA,ICOM1,0,78.0,FINESTEERING,1970,470752.000,02000000,b1f6,14307;SOL_COMPUTED,NARROW_INT,52.02841404581,4.69047323820,6.6533,43.4000,WGS84,0.0127,0.0110,0.0314,"2001",6.000,0.000,22,18,18,18,00,21,30,37*3457035e
#BESTPOSA,ICOM1,0,78.0,FINESTEERING,1970,470753.000,02000000,b1f6,14307;SOL_COMPUTED,NARROW_INT,52.02841408424,4.69047327167,6.6601,43.4000,WGS84,0.0135,0.0117,0.0335,"2001",7.000,0.000,22,18,18,18,00,21,30,37*f0fc747a
#BESTPOSA,ICOM1,0,81.0,FINESTEERING,1970,470754.000,02000000,b1f6,14307;SOL_COMPUTED,NARROW_INT,52.02841408387,4.69047326298,6.6684,43.4000,WGS84,0.0142,0.0124,0.0355,"2001",8.000,0.000,22,18,18,18,00,21,30,37*a99420aa
#BESTPOSA,ICOM1,0,82.5,FINESTEERING,1970,470755.000,02000000,b1f6,14307;SOL_COMPUTED,NARROW_INT,52.02841408365,4.69047326981,6.6703,43.4000,WGS84,0.0150,0.0131,0.0374,"2001",9.000,0.000,22,18,18,18,00,21,30,37*458346b0
#BESTPOSA,ICOM1,0,82.5,FINESTEERING,1970,470756.000,02000000,b1f6,14307;SOL_COMPUTED,SINGLE,52.02842113208,4.69048708608,10.2447,43.4000,WGS84,1.2971,1.1601,3.3585,"",0.000,0.000,23,19,19,19,00,06,30,33*7529c926
#BESTPOSA,ICOM1,0,81.5,FINESTEERING,1970,470757.000,02000000,b1f6,14307;SOL_COMPUTED,SINGLE,52.02842124699,4.69048712521,10.2091,43.4000,WGS84,1.2976,1.1602,3.3627,"",0.000,0.000,23,19,19,19,00,06,30,33*9b05ff90
#BESTPOSA,ICOM1,0,81.5,FINESTEERING,1970,470758.000,02000000,b1f6,14307;SOL_COMPUTED,SINGLE,52.02842112580,4.69048714904,10.2465,43.4000,WGS84,1.2971,1.1603,3.3582,"",0.000,0.000,23,19,19,19,00,06,30,33*33515393
#BESTPOSA,ICOM1,0,79.5,FINESTEERING,1970,470759.000,02000000,b1f6,14307;SOL_COMPUTED,NARROW_INT,52.02841404590,4.69047310550,6.6780,43.4000,WGS84,0.0089,0.0076,0.0220,"2002",2.000,0.000,22,18,18,18,00,20,30,37*5861411f
#BESTPOSA,ICOM1,0,79.5,FINESTEERING,1970,470760.000,02000000,b1f6,14307;SOL_COMPUTED,NARROW_INT,52.02841405696,4.69047307105,6.6784,43.4000,WGS84,0.0078,0.0065,0.0189,"2002",1.000,0.000,22,18,18,18,00,21,30,37*4e762b61
#BESTPOSA,ICOM1,0,79.5,FINESTEERING,1970,470761.000,02000000,b1f6,14307;SOL_COMPUTED,NARROW_INT,52.02841407019,4.69047308814,6.6787,43.4000,WGS84,0.0089,0.0076,0.0218,"2002",2.000,0.000,22,18,18,18,00,21,30,37*9ccc75dc
#BESTPOSA,ICOM1,0,80.5,FINESTEERING,1970,470762.000,02000000,b1f6,14307;SOL_COMPUTED,NARROW_INT,52.02841403858,4.69047308971,6.6777,43.4000,WGS84,0.0078,0.0065,0.0189,"2002",1.000,0.000,23,18,18,18,00,21,30,37*156bb0ef
#BESTPOSA,ICOM1,0,80.5,FINESTEERING,1970,470763.000,02000000,b1f6,14307;SOL_COMPUTED,NARROW_INT,52.02841403917,4.69047306004,6.6737,43.4000,WGS84,0.0090,0.0076,0.0221,"2002",2.000,0.000,21,17,17,17,00,21,30,37*4d7d64c4
#BESTPOSA,ICOM1,0,81.5,FINESTEERING,1970,470764.000,02000000,b1f6,14307;SOL_COMPUTED,NARROW_INT,52.02841403421,4.69047307036,6.6700,43.4000,WGS84,0.0078,0.0065,0.0192,"2002",1.000,0.000,22,17,17,17,00,21,30,37*44ed89ed
#BESTPOSA,ICOM1,0,80.5,FINESTEERING,1970,470765.000,02000000,b1f6,14307;SOL_COMPUTED,NARROW_INT,52.02841404640,4.69047306261,6.6699,43.4000,WGS84,0.0090,0.0076,0.0223,"2002",2.000,0.000,22,18,18,18,00,21,30,37*4d99608f
Base stations using the same base station ID
When the base stations are all using the same base station ID, the rover receivers will not be able to use the base station ID to identify a particular base station and treat the combined data as being transmitted by a single base station. It is not possible to tell which base station the rover has been using at any given moment in time, since the rover might be continuously switching base stations. As long as all base stations have been surveyed correctly, using the same reference datum, the end result will be a combined system in which the (temporary) loss of one or more base stations will be hardly noticed. Problems may arise, however, if one or more bases stations have not been surveyed correctly or if one or more base stations are using a different reference datum. In this case, the rover positioning results may become a bit unpredictable, especially since the rover will report an RTK Fix (NARROW_INT) position at all times. Problems may also show when the rover receiver starts combining correction data from two different base stations, for example when the rover is using the RTK base station position from one base station and the GNSS corrections from a different base station, which might happen when using RTCMv3 messages. Theoretically, this may result in a position offset as large as the distance between the two base stations.
The data below shows the behaviour of a rover in a setup in which two base stations (base #1 and base #2, both using station ID 2001) are transmitting their correction data. Base #2 was not surveyed correctly and as a result has a height offset of 1 metre. On top of that, the rover sometimes seems to be mismatching the RTK base station position and the GNSS corrections. As can be seen from the latitude. longitude and height indications, the rover is continuously switching base stations, resulting in a reportedly very accurate (NARROW_INT) but basically completely unusable rover position.
#BESTPOSA,ICOM1,0,81.0,FINESTEERING,1970,473732.000,02000000,b1f6,14307;SOL_COMPUTED,NARROW_INT,52.02842349338,4.69048560121,6.5646,43.4000,WGS84,0.0077,0.0067,0.0153,"2001",1.000,0.000,24,20,20,20,00,20,30,37*77bee22d
#BESTPOSA,ICOM1,0,80.0,FINESTEERING,1970,473733.000,02000000,b1f6,14307;SOL_COMPUTED,NARROW_INT,52.02842348284,4.69048556173,6.5608,43.4000,WGS84,0.0088,0.0079,0.0176,"2001",2.000,0.000,24,20,20,20,00,20,30,37*30471967
#BESTPOSA,ICOM1,0,80.0,FINESTEERING,1970,473734.000,02000000,b1f6,14307;SOL_COMPUTED,NARROW_INT,52.02841406824,4.69047311581,5.6602,43.4000,WGS84,0.0077,0.0067,0.0153,"2001",1.000,0.000,24,20,20,20,00,20,30,37*65abec08
#BESTPOSA,ICOM1,0,81.0,FINESTEERING,1970,473735.000,02000000,b1f6,14307;SOL_COMPUTED,NARROW_INT,52.02841406373,4.69047309473,5.6560,43.4000,WGS84,0.0088,0.0079,0.0176,"2001",2.000,0.000,24,20,20,20,00,20,30,37*6b165964
#BESTPOSA,ICOM1,0,81.0,FINESTEERING,1970,473736.000,02000000,b1f6,14307;SOL_COMPUTED,NARROW_INT,52.02841406258,4.69047309110,5.6636,43.4000,WGS84,0.0077,0.0067,0.0153,"2001",1.000,0.000,24,20,20,20,00,20,30,37*ec576f06
#BESTPOSA,ICOM1,0,81.0,FINESTEERING,1970,473737.000,02000000,b1f6,14307;SOL_COMPUTED,NARROW_INT,52.02841407181,4.69047310124,5.6675,43.4000,WGS84,0.0089,0.0080,0.0177,"2001",2.000,0.000,24,20,20,20,00,20,30,37*0587787b
#BESTPOSA,ICOM1,0,82.0,FINESTEERING,1970,473738.000,02000000,b1f6,14307;SOL_COMPUTED,NARROW_INT,52.02841406079,4.69047314209,5.6641,43.4000,WGS84,0.0077,0.0067,0.0153,"2001",1.000,0.000,24,20,20,20,00,20,30,37*7933abe3
#BESTPOSA,ICOM1,0,81.5,FINESTEERING,1970,473739.000,02000000,b1f6,14307;SOL_COMPUTED,NARROW_INT,52.02841406380,4.69047313057,5.6661,43.4000,WGS84,0.0089,0.0079,0.0176,"2001",2.000,0.000,24,20,20,20,00,20,30,37*dc07d1bd
#BESTPOSA,ICOM1,0,81.0,FINESTEERING,1970,473740.000,02000000,b1f6,14307;SOL_COMPUTED,NARROW_INT,52.02841410405,4.69047309772,5.6529,43.4000,WGS84,0.0077,0.0067,0.0153,"2001",1.000,0.000,24,20,20,20,00,20,30,37*716efb0c
#BESTPOSA,ICOM1,0,81.0,FINESTEERING,1970,473741.000,02000000,b1f6,14307;SOL_COMPUTED,NARROW_INT,52.02841411154,4.69047310556,5.6550,43.4000,WGS84,0.0088,0.0079,0.0176,"2001",2.000,0.000,24,20,20,20,00,20,30,37*dffb1aee
#BESTPOSA,ICOM1,0,81.0,FINESTEERING,1970,473742.000,02000000,b1f6,14307;SOL_COMPUTED,NARROW_INT,52.02842350351,4.69048560541,6.5587,43.4000,WGS84,0.0077,0.0067,0.0153,"2001",1.000,0.000,24,20,20,20,00,20,30,37*34a49802
#BESTPOSA,ICOM1,0,80.5,FINESTEERING,1970,473743.000,02000000,b1f6,14307;SOL_COMPUTED,NARROW_INT,52.02842350209,4.69048561685,6.5595,43.4000,WGS84,0.0088,0.0079,0.0176,"2001",2.000,0.000,24,20,20,20,00,20,30,37*4d0aa774
#BESTPOSA,ICOM1,0,80.5,FINESTEERING,1970,473744.000,02000000,b1f6,14307;SOL_COMPUTED,NARROW_INT,52.02841407214,4.69047309492,5.6622,43.4000,WGS84,0.0077,0.0067,0.0153,"2001",1.000,0.000,24,20,20,20,00,20,30,37*cce3efff
#BESTPOSA,ICOM1,0,81.5,FINESTEERING,1970,473745.000,02000000,b1f6,14307;SOL_COMPUTED,NARROW_INT,52.02841408254,4.69047308520,5.6618,43.4000,WGS84,0.0089,0.0079,0.0176,"2001",2.000,0.000,24,20,20,20,00,20,30,37*7c873404
#BESTPOSA,ICOM1,0,81.5,FINESTEERING,1970,473746.000,02000000,b1f6,14307;SOL_COMPUTED,NARROW_INT,52.02841408162,4.69047309788,5.6554,43.4000,WGS84,0.0077,0.0067,0.0153,"2001",1.000,0.000,24,20,20,20,00,20,30,37*858eddf4
#BESTPOSA,ICOM1,0,81.0,FINESTEERING,1970,473747.000,02000000,b1f6,14307;SOL_COMPUTED,NARROW_INT,52.02841409253,4.69047312196,5.6649,43.4000,WGS84,0.0089,0.0080,0.0176,"2001",2.000,0.000,24,20,20,20,00,20,30,37*0f317766
#BESTPOSA,ICOM1,0,81.0,FINESTEERING,1970,473748.000,02000000,b1f6,14307;SOL_COMPUTED,NARROW_INT,52.02841409256,4.69047310266,5.6610,43.4000,WGS84,0.0077,0.0068,0.0153,"2001",1.000,0.000,24,20,20,20,00,20,30,37*ac26770c
#BESTPOSA,ICOM1,0,81.0,FINESTEERING,1970,473749.000,02000000,b1f6,14307;SOL_COMPUTED,NARROW_INT,52.02841411273,4.69047308042,5.6552,43.4000,WGS84,0.0088,0.0080,0.0176,"2001",2.000,0.000,24,20,20,20,00,20,30,37*a48e8c9b
#BESTPOSA,ICOM1,0,81.5,FINESTEERING,1970,473750.000,02000000,b1f6,14307;SOL_COMPUTED,NARROW_INT,52.02841406197,4.69047311094,5.6577,43.4000,WGS84,0.0077,0.0067,0.0153,"2001",1.000,0.000,24,20,20,20,00,20,30,37*11577130
#BESTPOSA,ICOM1,0,75.5,FINESTEERING,1970,473751.000,02000000,b1f6,14307;SOL_COMPUTED,NARROW_INT,52.02841405227,4.69047307597,5.6535,43.4000,WGS84,0.0088,0.0079,0.0176,"2001",2.000,0.000,24,20,20,20,00,20,30,37*1c5b5f24
#BESTPOSA,ICOM1,0,75.5,FINESTEERING,1970,473752.000,02000000,b1f6,14307;SOL_COMPUTED,NARROW_INT,52.02842350306,4.69048559145,6.5587,43.4000,WGS84,0.0077,0.0067,0.0153,"2001",1.000,0.000,24,20,20,20,00,20,30,37*4104dfe3
#BESTPOSA,ICOM1,0,75.5,FINESTEERING,1970,473753.000,02000000,b1f6,14307;SOL_COMPUTED,NARROW_INT,52.02842351079,4.69048559955,6.5587,43.4000,WGS84,0.0088,0.0079,0.0176,"2001",2.000,0.000,24,20,20,20,00,20,30,37*bea046bc
Advantages and disadvantages
As long as all base stations have been properly surveyed, using a single base station ID for all base stations provides a very robust solution in which the (temporary) loss of one of the base stations has minimal to no impact on the rover position solutions. However, if the base station position and the GNSS correction data are not all sent in one single message (like with RTCM, RTCA or CMR) or as soon as one of the base stations is not correctly surveyed there is a fair chance that the rover receiver(s) will start showing position jumps without ever indicating that something might be wrong.
Using unique base station IDs for all base stations will make sure a rover will only use corrections from a single base station as long as it is able to keep a connection with the base station, making this an accurate solution without unexpected position jumps. The downside of this solution: when the connection to the base station is lost, the rover will drop to a single point position before it starts using a different base station. Nevertheless, this is definitely preferred over a position that is constantly jumping around.