Positioning status
The Positioning tile displays information about the position calculated by the receiver.
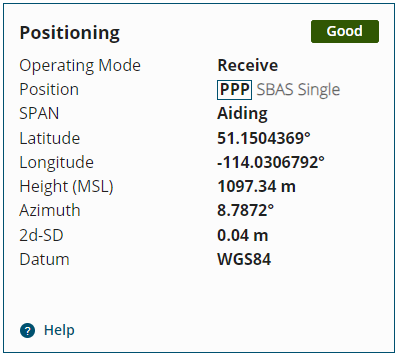
Operating Mode
The receiver operating mode.
-
Transmit
The receiver is configured as a base station, but is not yet transmitting corrections. A base station receiver generates differential corrections and sends that data to rover receivers. The receiver can operate as an RTK base station.
-
Transmit (FIXEDPOS)
The receiver is configured as a base station, has determined its fixed position and is transmitting corrections.
-
Receive
The receiver is configured to receive GNSS correction data from an RTK base station, an RTK network, a correction service such as TerraStar, or from SBAS to calculate a more accurate position.
-
Standalone
The receiver is configured to calculate a position using observed GNSS data only. This is the default operating mode.
Position
The positioning type used to calculate the position.
This field shows all of the position types configured on the receiver. The position type being used is highlighted with a box.
-
None
A position solution has not been calculated.
-
Single
A GNSS code based position is being calculated without the use of any correction sources. This is the default positioning type.
-
SBAS
A GNSS code based position is being calculated using corrections provided by an SBAS system, such as WAAS.
-
FIXEDPOS
The fixed position of the receiver has been configured in the receiver, but the receiver is not configured as an RTK base station.
-
PPP
A carrier based position is being calculated using corrections provided by TerraStar or Oceanix.
-
RTK
A carrier based position is being calculated using the Real Time Kinematic (RTK) method. If the Operating Mode is Transmit, this receiver is acting as the base station and is providing corrections to a rover receiver. If the Operating Mode is Receive, this receiver is acting as the rover receiver and is receiving corrections from a base station.
-
PSR DIFF
A GNSS code based position is being calculated using corrections provided by differential GNSS base station.
SPAN
SPAN is a GNSS+INS navigation technology that provides a reliable position, velocity and attitude solution.
-
Off
SPAN IMU type is not configured.
-
Inactive
SPAN IMU type is configured and the Inertial Solution Status is any status other than INS_SOLUTION_GOOD.
-
Ready
The Inertial Solution Status is INS_SOLUTION_GOOD and the INS position type is any status other than INS positions.
-
Aiding
The Inertial Solution Status is INS_SOLUTION_GOOD and the INS position type is any status of INS positions.
Latitude
Latitude of the receiver position in degrees.
Longitude
Longitude of the receiver position in degrees.
Height
The height of the receiver in metres.
The height is shown as height above mean sea level (MSL) or as ellipsoidal height. When the height set to show height above sea level, "(MSL)" is included in the field name.
To change the format used for height, refer to General settings.
Height Accuracy
The vertical standard deviation in metres (RMS). (MarinePak7 only)
Azimuth
Left-handed rotation around the z-axis in degrees clockwise from North. (0° to 359.99°)
This is the inertial azimuth calculated from the IMU gyros and the SPAN filters.
Azimuth is available only if SPAN is active.
Heading
Heading in degrees clockwise from North. (0° to 359.99°)
Heading is determined from the positions of two GNSS antennas. This can be antennas connected to two ALIGN capable receivers configured to communicate with each other or a dual antenna receiver such as the PwrPak7D or OEM7720.
Heading is available only on ALIGN capable receivers.
-
If ALIGN is not configured, this field displays --.
-
If ALIGN is configured and Heading data is not available, this field displays --.
-
If ALIGN is configured and Heading data is available, this field displays the Heading in degrees.
2d-SD
The horizontal standard deviation of the position.
Datum
The datum in which the Latitude, Longitude and Height are reported. The default is WGS84.
Reference Station
The reference station from which the receiver is getting correction data.(MarinePak7 only)
Correction Age
The age of the last correction data received from the reference station. (MarinePak7 only)