Definition of reference frames within SPAN
|
Platform: |
OEM719, OEM729, OEM7500, OEM7600, OEM7700, OEM7720, PwrPak7, CPT7, CPT7700, SMART7-S |
The reference frames that are most frequently used throughout the SPAN documentation are the following:
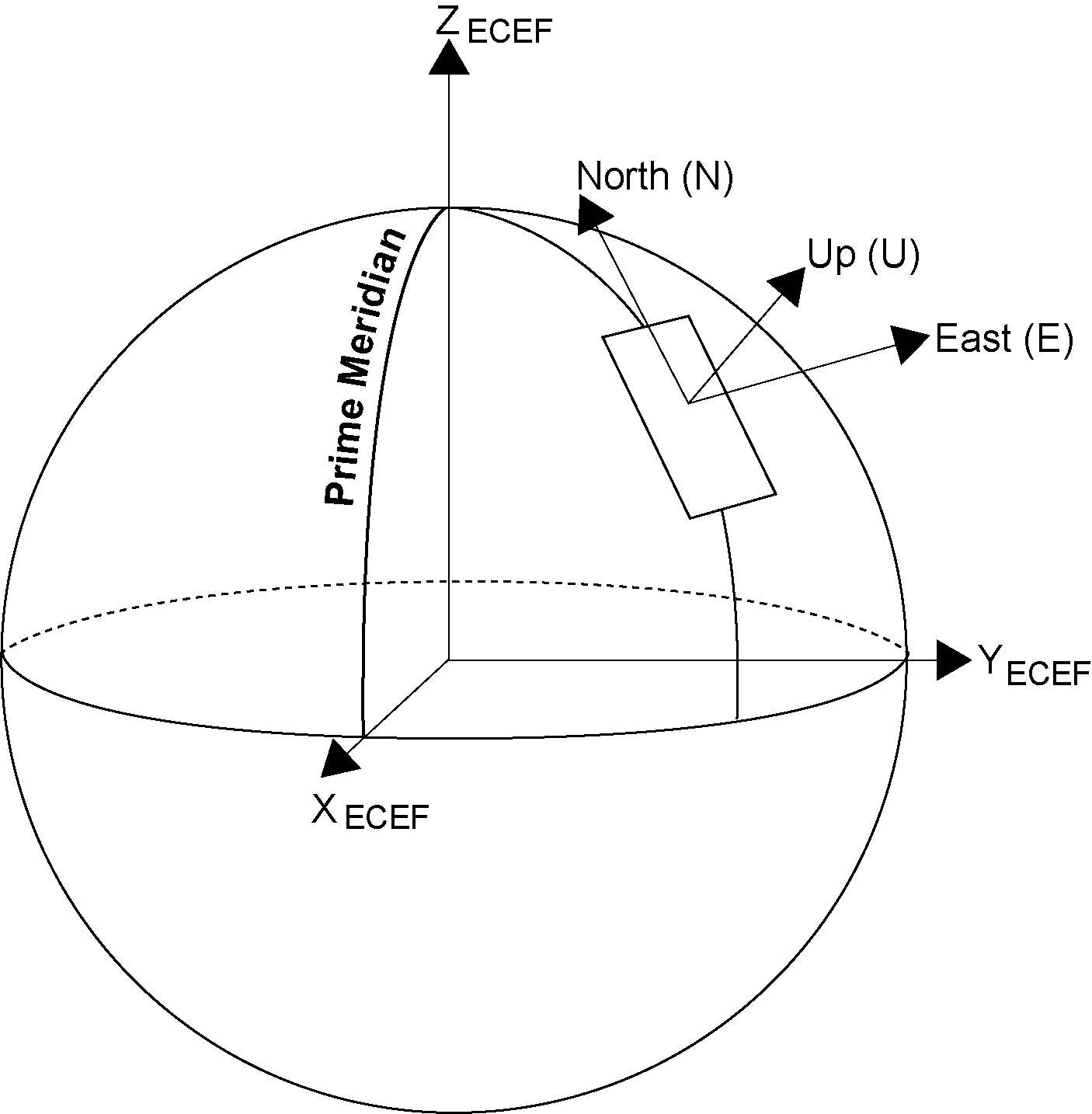
Local-level frame (ENU)
The definition of the local level coordinate frame is as follows:
-
E – pointing east
-
N – pointing north
-
U – pointing up
Local-level frame (ENU)
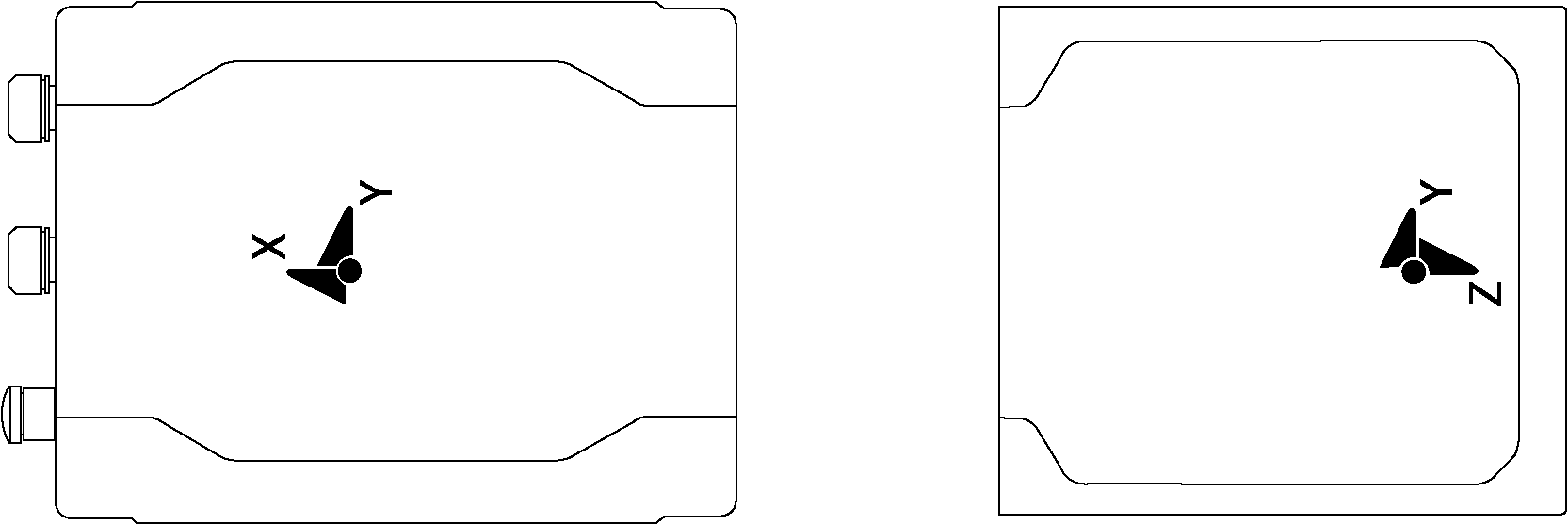
IMU body frame
The definition of the IMU Body frame is given by the physical axes of the IMU and represents how the sensors are mounted inside the IMU.
The axis marking on the CPT7 indicates the orientation of the X, Y and Z axis only. It does not indicate the centre of navigation. For the location of the centre of navigation, refer to Figure: CPT7/CPT7700 centre of navigation.
The origin of this frame is not the enclosure centre, but the centre of navigation (sensor centre).
IMU body frame marking
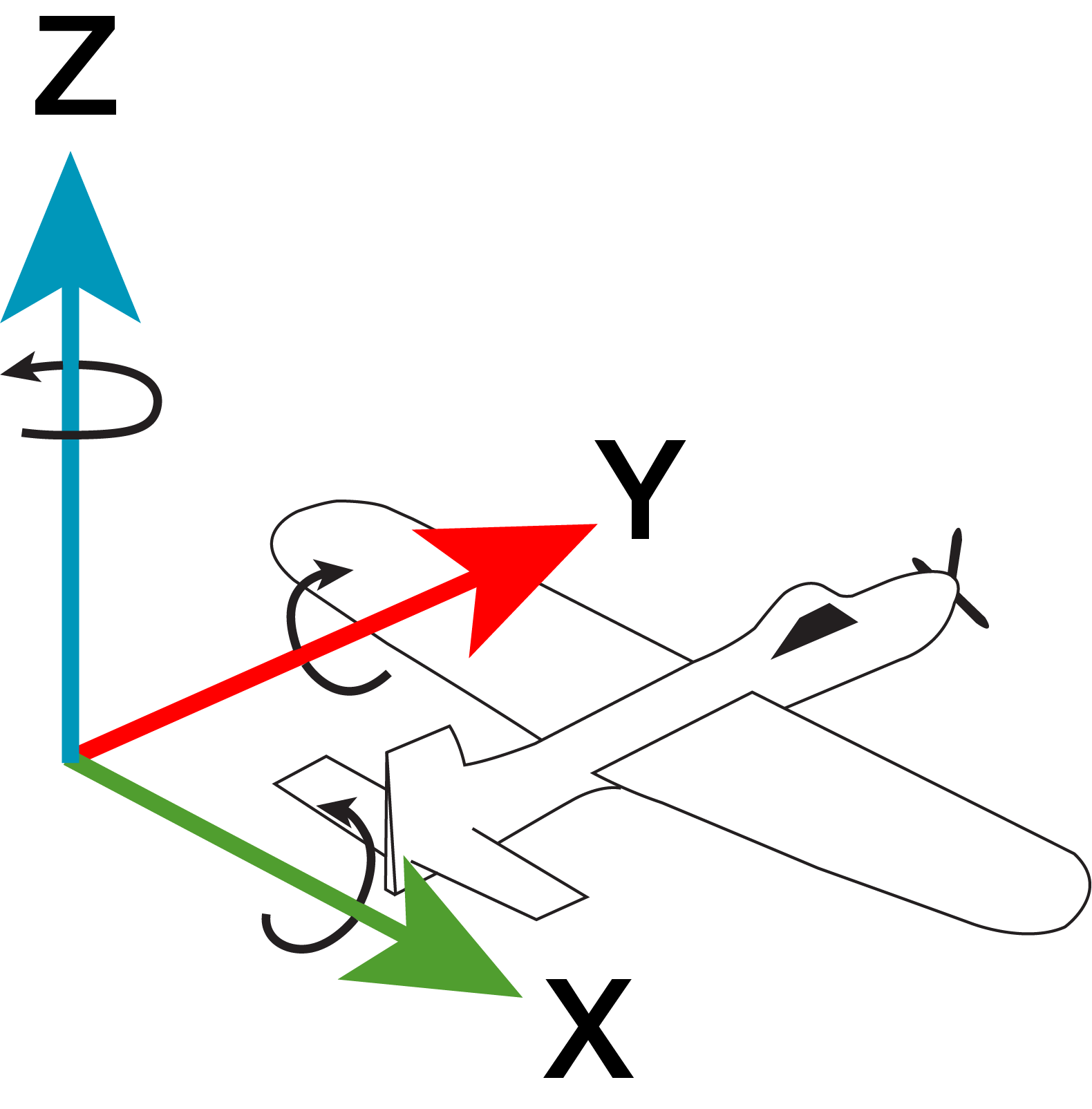
Vehicle frame
The definition of the vehicle frame is as follows:
-
z-axis – points up through the roof of the vehicle perpendicular to the ground
-
y-axis – points out the front of the vehicle in the direction of travel
-
x-axis – completes the right-handed system (out the right-hand side of the vehicle when facing forward)
Vehicle frame
User output frame
The user output frame is an arbitrary frame, which can be optionally defined to transfer inertial output to a more useful position or reference frame.
By default, SPAN position and velocity output is given at the centre of navigation of the IMU. To output position and velocity at a different location, specify a user offset translation using the SETINSTRANSLATION command.
By default, SPAN attitude output is the rotation from the Local-Level frame to the Vehicle frame. If attitude output is desired relative to another frame, specify a user offset rotation using the SETINSROTATION command.