MOVINGBASESTATION
Enables the use of a moving base station
|
Platform: |
OEM719, OEM729, OEM7500, OEM7600, OEM7700, OEM7720, PwrPak7, CPT7, CPT7700, SMART7, SMART2 |
This command is used to enable or disable a receiver from transmitting corrections without a fixed position.
The moving base function allows you to obtain a centimetre level xyz baseline estimate when the base station and possibly the rover are moving. It is very similar to normal RTK, with one stationary base station and a moving rover (refer to Transmitting and receiving corrections). The BSLNXYZ log is an asynchronous ‘matched’ log that can be logged with the onchanged trigger to provide an accurate baseline between the base and rover.
Due to the latency of the reference station position messages, the following logs are not recommended to be used when in moving baseline mode: BESTXYZ, GPGST, MARKPOS, MARK2POS, MATCHEDPOS, MATCHEDXYZ, RTKPOS and RTKXYZ. The position error of these logs could exceed 100 m, depending on the latency of the reference station position message. If a rover position is required during moving basestation mode, then PSRPOS is recommended.
The MOVINGBASESTATION command must be used to allow the base to transmit messages without a fixed position.
|
|
|
Message ID: 763
Abbreviated ASCII syntax:
MOVINGBASESTATION switch
Factory default:
MOVINGBASESTATION disable
ASCII example:
MOVINGBASESTATION ENABLE
|
|
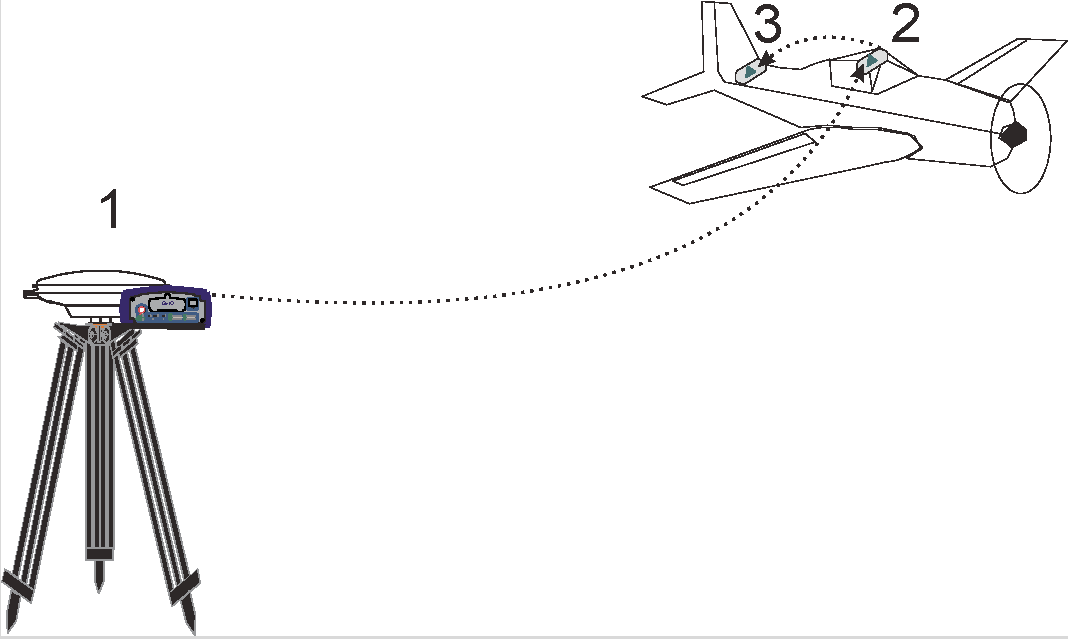
Consider the case where there is a fixed base, an airplane flying with a moving base station near its front and a rover station at its tail end. Moving base station ‘daisy chain’ effect
When using this method, the position type is only checked at the fixed base station. Moving base stations will continue to operate under any conditions. This command is useful for moving base stations doing RTK positioning at sea. A rover station is used to map out local areas (for marking shipping lanes, hydrographic surveying and so on), while the base station resides on the control ship. The control ship may not move much (parked at sea), but there is a certain amount of movement due to the fact that it is floating in the ocean. By using the MOVINGBASESTATION command, the control ship is able to use RTK positioning and move to new survey sites. |
|
Field |
Field type |
ASCII value |
Binary value |
Description |
Format |
Binary bytes |
Binary offset |
|
1 |
Command header |
- |
- |
MOVINGBASESTATION header This field contains the command name for abbreviated ASCII or the message header for ASCII or Binary. |
- |
H |
0 |
|
2 |
switch |
DISABLE |
0 |
Do not transmit corrections without a fixed position. |
Enum |
4 |
H |
|
ENABLE |
1 |
Transmit corrections without a fixed position. |